16
1 Introduction to the Autosampler
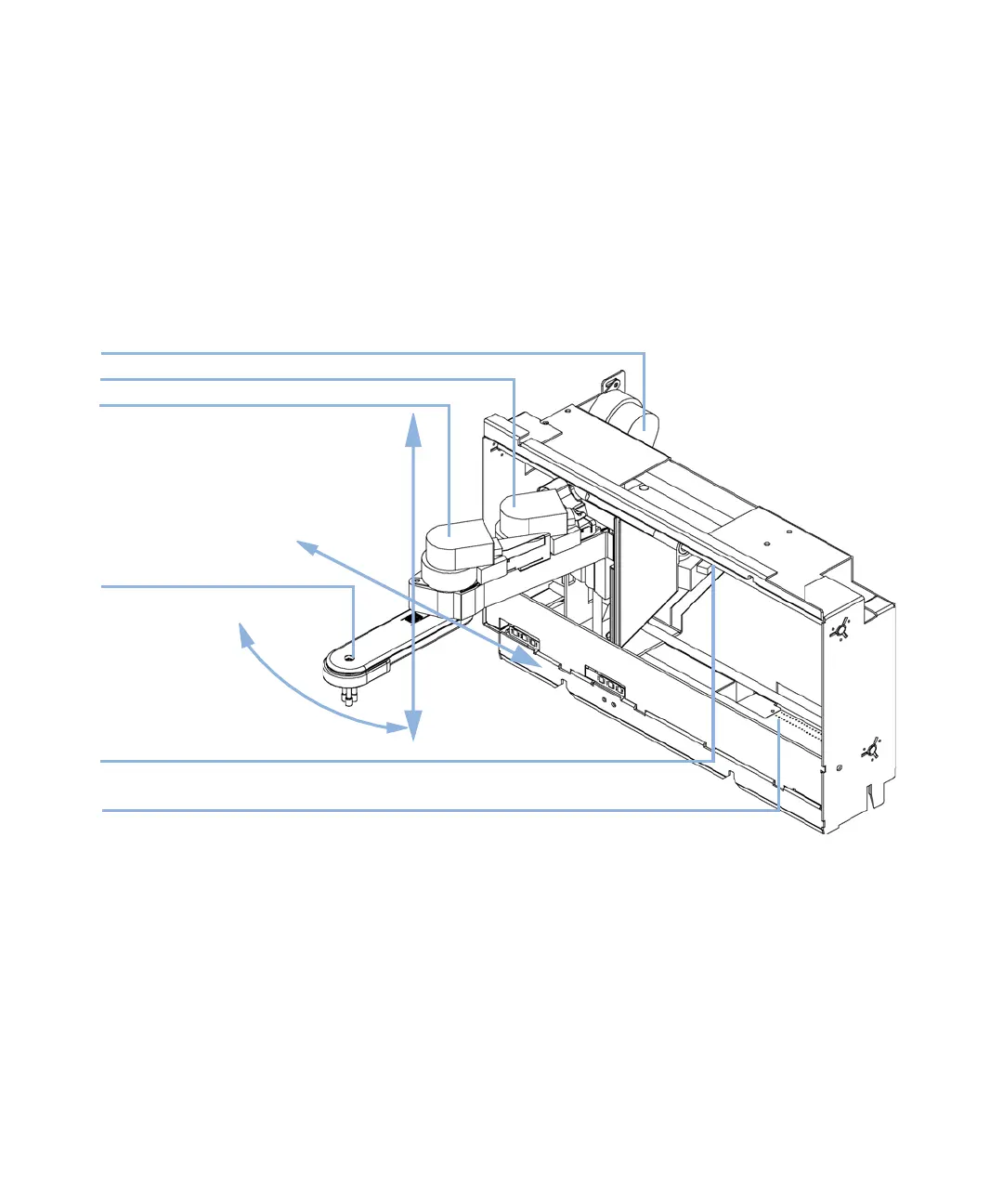
Transport Assembly
Transport Assembly
The transport unit comprises an X-axis slide (left-right motion), a Z-axis arm
(up-down motion), and a gripper assembly (rotation and vial-gripping).
Figure 7 Transport Assembly
The transport assembly uses four stepper motors driven in closed-loop mode
for accurate positioning of the gripper assembly for sample-vial transport. The
rotational movement of the motors is converted to linear motion (X- and
Z-axes) by toothed belts connected to the drive spindles. The rotation (theta
axes) of the gripper assembly is transferred from the motor by a toothed belt
and series of gears. The opening and closing of the gripper fingers are driven
by a stepper motor linked by a toothed belt to the planetary gearing inside the
gripper assembly.
Mbdidg
<g^eeZg
;aZmWdVgY
MVm^h
OVm^h
I]ZiVVm^h
I]ZiVbdidg
<g^eeZgbdidg
Obdidgcdi^ck^Zl