516 Rockwell Automation Publication 750-PM001N-EN-P - February 2017
Appendix F Integrated Motion on EtherNet/IP Application
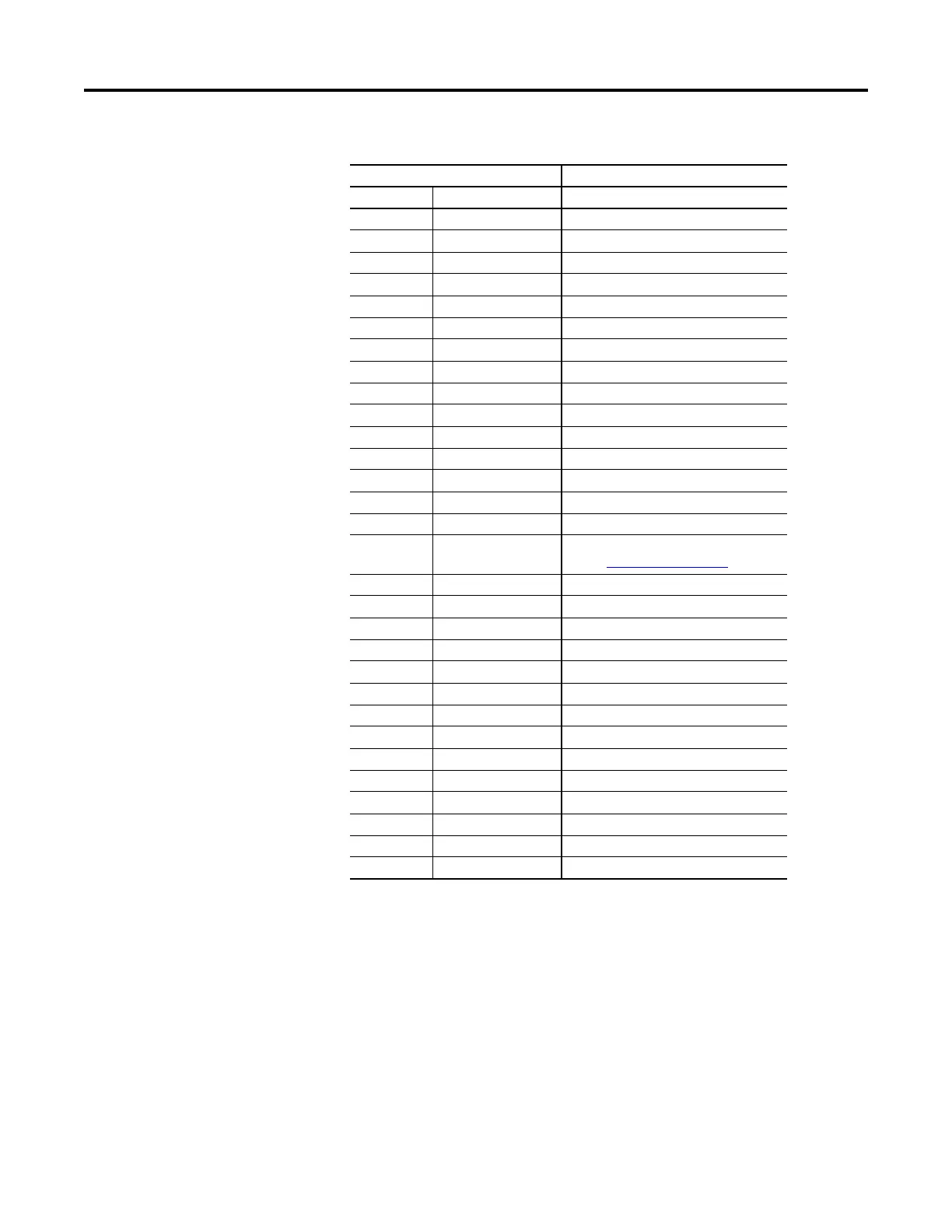
P758 Interp Trq Input Controller Torque Command
P759 Interp Psn Out Fine Command Position
P760 Interp Vel Out Fine Command Velocity
P761 Interp Trq Out Torque Command
P821 Psn Offset 1 Position Trim
P830 PsnNtchFltrFreq Position Notch Filter Frequency
P833 Psn Out FltrGain Position Lead Lag Filter Gain
P834 Psn Out Fltr BW Position Lead Lag Filter Bandwidth
P835 Psn Error Position Error
P837 Psn Load Actual Position Integral Feedback
P838 Psn Reg Ki Kpi
P839 Psn Reg Kp Kpp
P842 PsnReg IntgrlOut Position Integrator Output
P843 PsnReg Spd Out Position Loop Output
P847 Psn Fdbk Position Feedback
P940 Drive OL Count Inverter Capacity
(See See Motor Overload
on page 517)
P942 IGBT Temp C Inverter Temperature
P944 Drive Temp C Inverter Heatsink Temperature
P945 At Limit Status At Limit Status
P1100, Bit 0 Trq Prv Cfg/TP Enable Proving Configuration
P1100, Bit 6 Trq Prv Cfg/BrkSlipStart Auto Sag Start
P1100, Bit 9 Trq Prv Cfg/BrkSlp SpdLmt Auto Sag Config
P1104 Trq Lmt SlewRate Brake Prove Ramp Time
P1107 Brk Release Time Mechanical Brake Release Delay
P1108 Brk Set Time Mechanical Brake Engage Delay
P1109 Brk Alarm Travel Auto Sag Slip Increment
P1110 Brk Slip Count Brake Slip Tolerance
P1111 Float Tolerance Zero Speed
P1113 ZeroSpdFloatTime Zero Speed Time
P1114 Brake Test Torq Brake Test Torque
Table 32 - Parameter/Instance to Attribute Mapping (Continued)
Drive Integrated Motion
Parameter No. Parameter Name Integrated Motion on EtherNet/IP Instance

 Loading...
Loading...



