130 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
Actual position is the current position of a physical axis as measured by the axis
encoder. This is the only valid selection when the master axis’ Axis Type is
configured as Feedback Only.
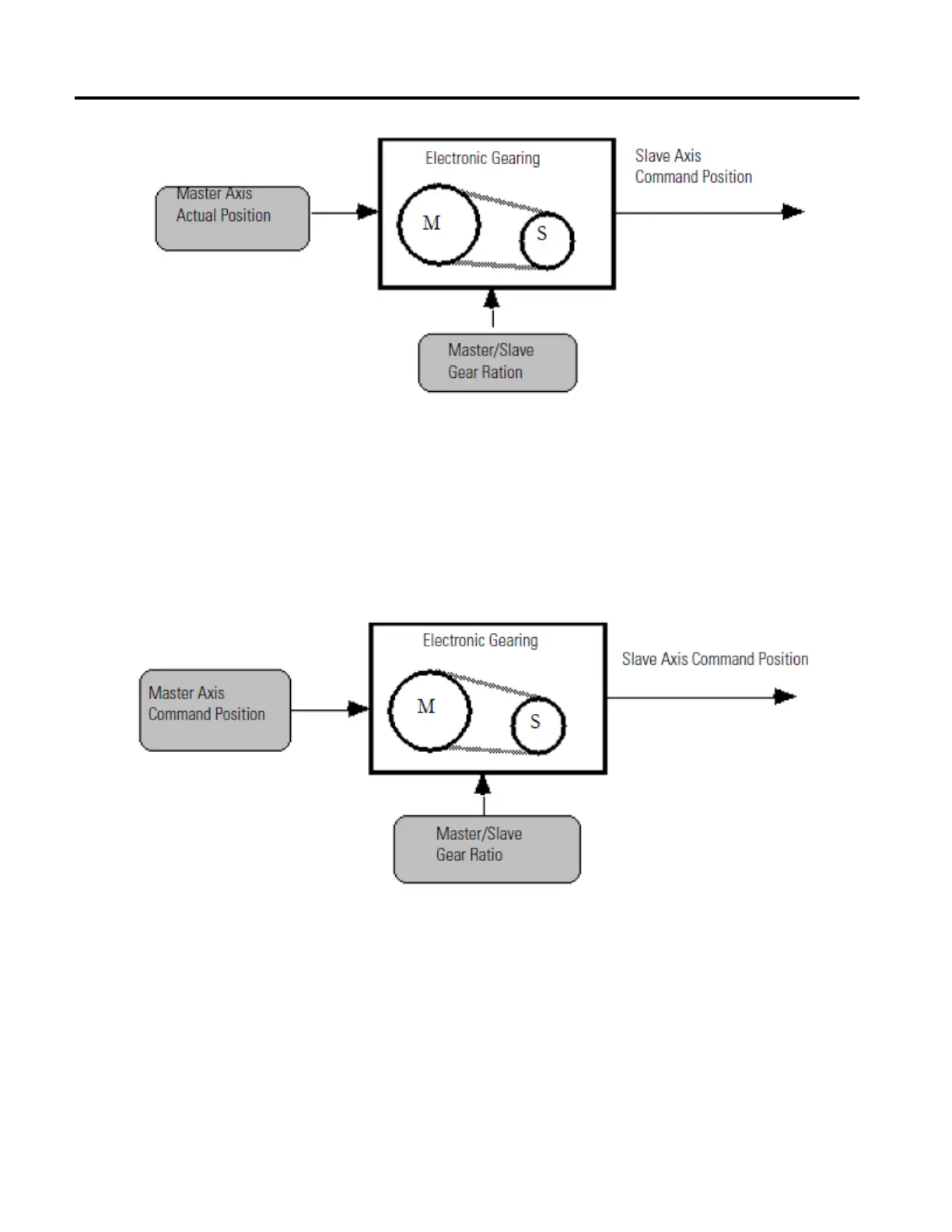
Slave to the Command Position
When Command Position is entered or selected as the Master Reference source,
the slave axis motion is generated from the command position of the master axis as
shown below.
Command position (only valid when the master axis’ Axis Type is configured as
Servo) is the current desired or commanded position for the master axis.
Since the command position does not incorporate any associated following error,
external position disturbances, or quantization noise, it is a more accurate and
stable reference for gearing. When gearing to the command position of the master,
the master axis must be commanded to move to cause any motion on the slave axis.
 Loading...
Loading...







