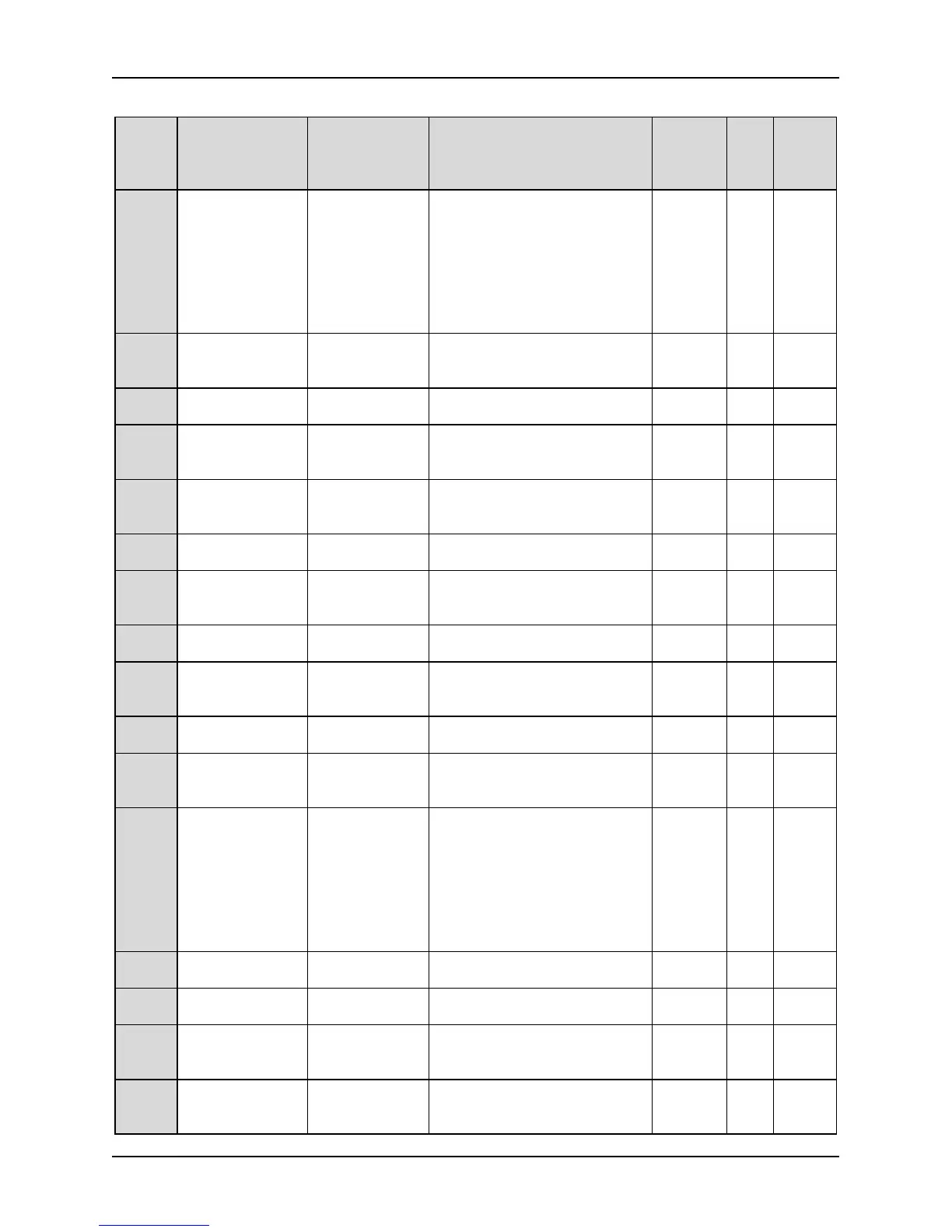
P8: Vector control parameters
Functi
on
code
Parameter LCD display Setting range
Factory
setting
Mo
difi
cati
on
MOD
BUS
addres
s
P8.00
Pre-excitation
current
compensation
amount
Pre-excitation
current
compensation
0.0~500.0%
100.0% corresponds to the
motor no-load current; the
response time is set in P1.04
The upper limit is 80% of the
rated current of the inverter or
the smaller rated current of the
motor
100.0% × 0900
P8.01
Speed loop
proportional gain
1
Speed loop
proportional
gain 1
0.1~30.0 10.0 ○ 0901
P8.02
Speed loop
integral time 1
Speed loop
integral time 1
0.001~10.000s 0.200s ○ 0902
P8.03
Speed loop
switching
frequency 1
Speed loop
switching
frequency 1
0.00Hz ~ speed loop switching
frequency 2
5.00Hz ○ 0903
P8.04
Speed loop
proportional gain
2
Speed loop
proportional
gain 2
0.1~30.0 10.0 ○ 0904
P8.05
Speed loop
integral time 2
Speed loop
integral time 2
0.001~10.000s 0.600s ○ 0905
P8.06
Speed loop
switching
frequency 2
Speed loop
switching
frequency 2
Speed loop switching frequency
1 ~ maximum frequency
10.00
Hz
○ 0906
P8.07
Speed loop filter
time
Speed loop
filter time
0.000s~0.100s 0.030s ○ 0907
P8.08
Current loop
proportional gain
Current loop
proportional
gain
0.1~9.9 1.0 ○ 0908
P8.09
Current loop
integral time
Current loop
integral time
0.001~1.000s 0.100s ○ 0909
P8.10
Torque control
mode
Torque mode
0: Run in speed control mode
1: Run in torque control mode
2: Run in moment motor mode
0 ○ 090A
P8.11
Driving torque
setting source
Driving torque
setting source
0: Digital setting
1: AI1
2: AI2
3: AI3 (reserve for 3004GB and
below models)
4: Pulse input
5: Serial communication
0 × 090B
P8.12
Upper limit of
drive torque
Upper limit of
drive torque
0.0%~200.0% 160% ○ 090C
P8.13
Upper limit of
braking torque
Upper limit of
braking torque
0.0%~200.0% 160% ○ 090D
P8.14
Instruction slip
compensation
coefficient
Instruction slip
compensation
coefficient
0.0%~200.0% 102.4% ○ 090E
P8.15
Torque
acceleration time
Torque
acceleration
time
0.00~120.0s 0.50s ○ 090F