Amtech
6-72
6
B607: ASR Drive Torque Limit (%)
In motoring mode, it will limit the quadrature current component (torque current) for vector control.
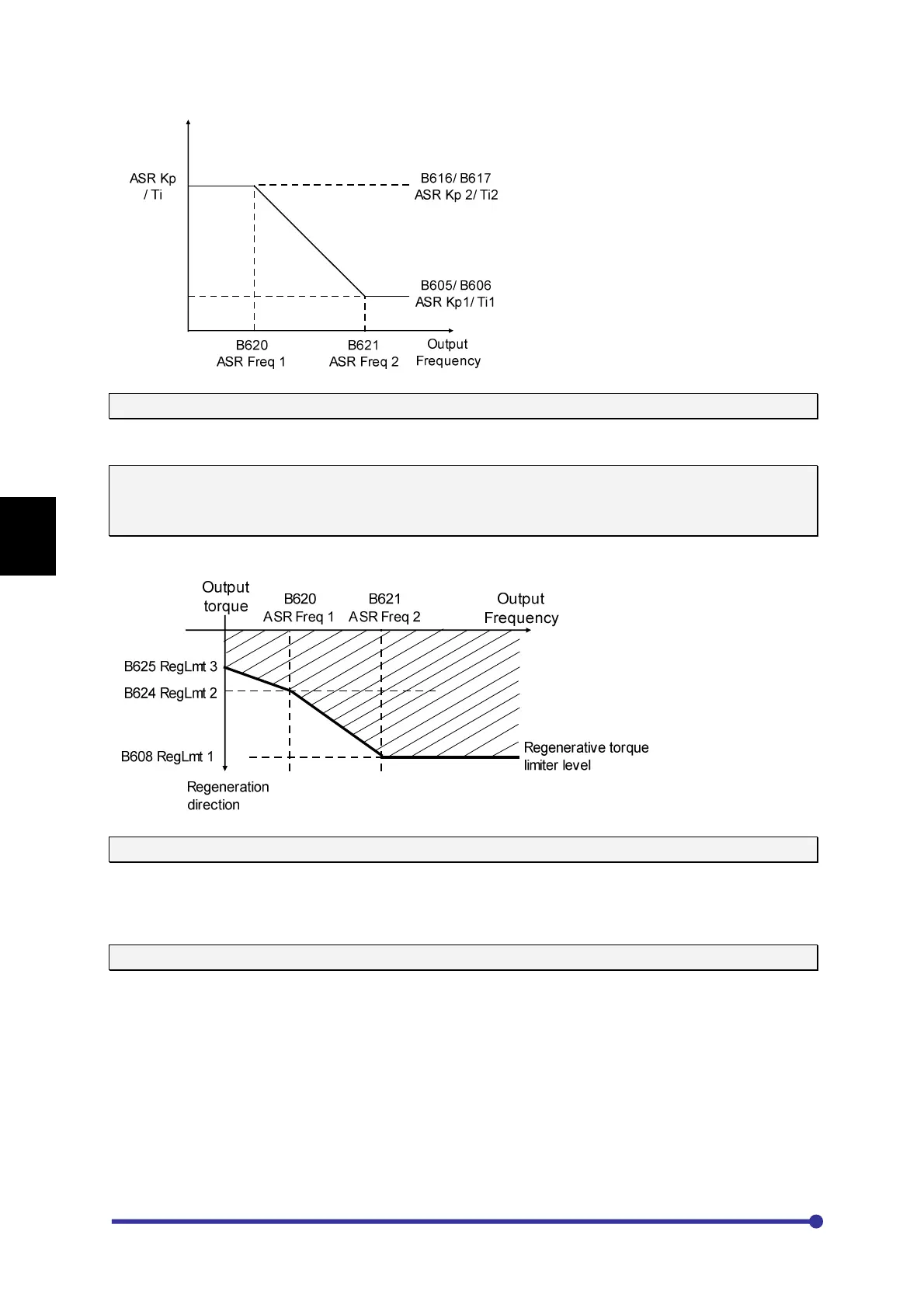
B608: ASR Regenerative Torque Limit 1 (%)
B624: ASR Regenerative Torque Limit 2 (%)
B625: ASR Regenerative Torque Limit 3 (%)
In regenerative mode, it will limit the quadrature current component (torque current).
B609: Speed Estimation Kp 1 & B618: Speed Estimation Kp 2
This is a proportional gain for the adaptive speed estimation. To increase the speed estimation
response, set large value. Note that if the value is too high the speed estimation value will hunt. These
parameters are applicable for sensor less vector control only.
B610: Speed Estimation Ti 1 & B619: Speed Estimation Ti 2 (Sec)
This is an Integral time constant for the adaptive speed estimation. To increase the speed estimation
response, set low value. Note that if the value is too low the speed estimation value will hunt. These
parameters are applicable for sensor less vector control only.