Axpert-Eazy AC Variable Frequency Drive
6-15
6
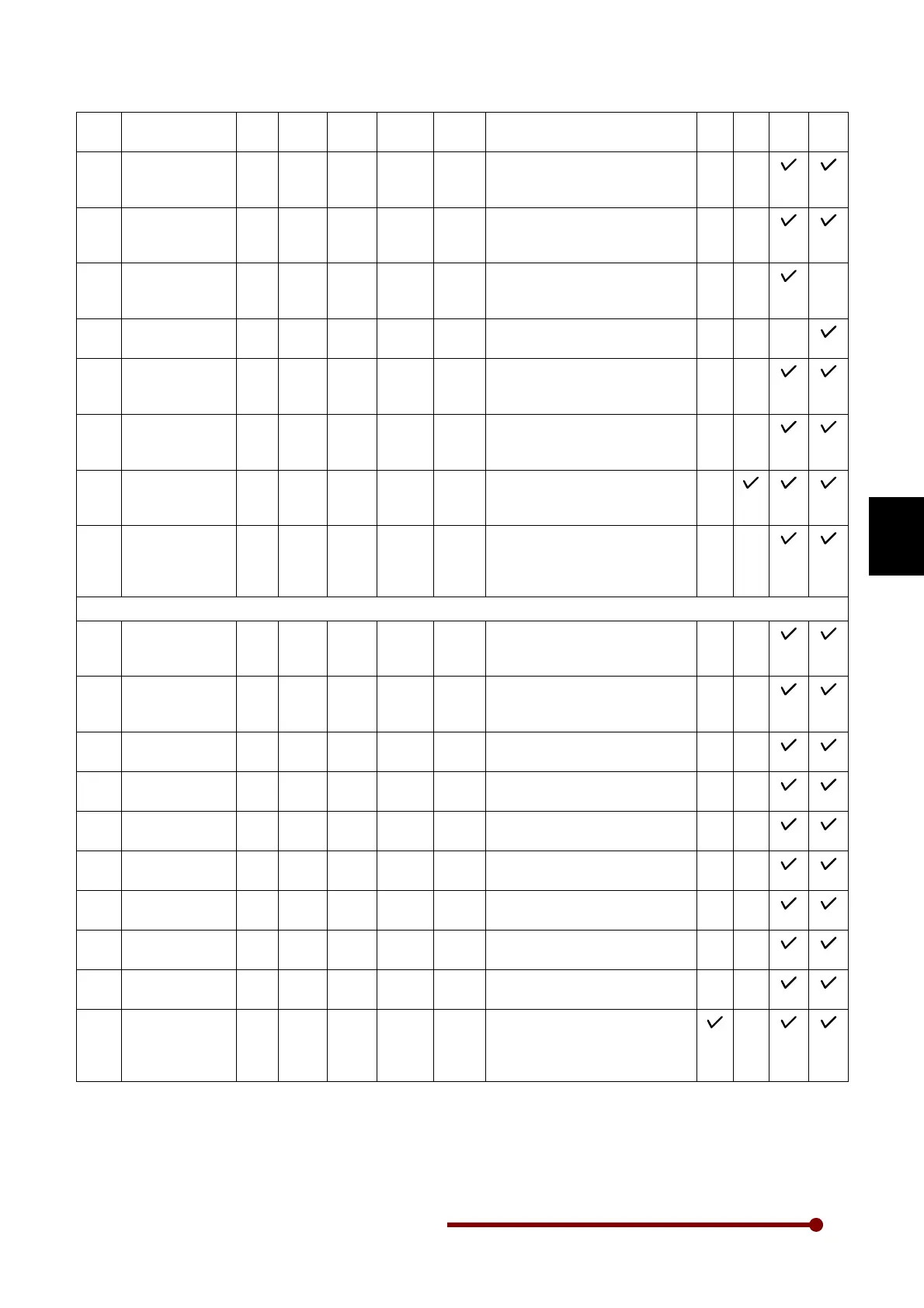
No. Parameter Unit
Def Min Max Res. Description WP
CL
OL
CL
B620
ASR Gain
Change
Frequency 1
Hz 4.00 0.00 600.00
0.01 ASR Gain Change (lower)
Frequency 1. It should be <
B621.
B621
ASR Gain
Change
Frequency 2
Hz 8.00 0.00 600.00
0.01 ASR Gain Change (higher)
Frequency 2. It should be >
B620.
B622
Speed LPF Time
Constant 2
ms 50.0 4.0 1000.0
0.1 Speed feedback low pass filter
Time constant 2 for lower
frequency (below B620).
B623
Encoder LPF
Time Constant
mS 8 0 100 1 Encoder low pass filter time
constant.
B624
ASR
Regenerative
Torque Limit 2
% 20.0 0.1 100.0 0.1 Regenerative torque limit 2.
B625
ASR
Regenerative
Torque Limit 3
% 10.0 0.1 100.0 0.1 Regenerative torque limit 3.
B626
Speed Deviation
Fault Judgment
Time
Sec 10.0 0.1 20.0 0.1 Set the time for judging speed
deviation fault.
B627
Field Weakening
Gain
1.00 0.10 2.00 0.01 Field Weakening Gain. If hunting
occurred in speed in field
weakening region, decrease
gain.
7: VECTOR CONTROL CONSTANTS
B701
Torque Mode
Selection
0 0 1 1 This parameter will select the
torque control mode.
=0: Disable =1: Enable
B702
Excitation
Current
Reference
% 35 15 100 1 Excitation Current Set value
B703
Torque LPF Time
constant
ms 0.0 0.0 1000.0
0.1 Torque reference low pass filter
Time constant
B704
ACR Kp 0.45 0.01 100.00
0.01 Proportional gain for speed
regulator
B705
ACR Ti ms 0.40 0.01 300.00
0.01 Integral time constant for speed
regulator
B706
ACR Q Upper
Lmt
% 100.0
0.0 150.0 0.1 ACR Q-Controller output upper
limit
B707
ACR Q Lower
Lmt
% 100.0
0.0 150.0 0.1 ACR Q-Controller output lower
limit
B708
ACR D Upper
Lmt
% 100.0
0.0 150.0 0.1 ACR D-Controller output upper
limit
B709
ACR D Lower
Lmt
% 100.0
0.0 150.0 0.1 ACR D-controller output lower
limit
B710
Torque reference
Polarity
% 0 0 1 1 This is used to select Torque
reference polarity.
=0: Unipolar
=1: Bipolar