120
7598H–AVR–07/09
ATtiny25/45/85
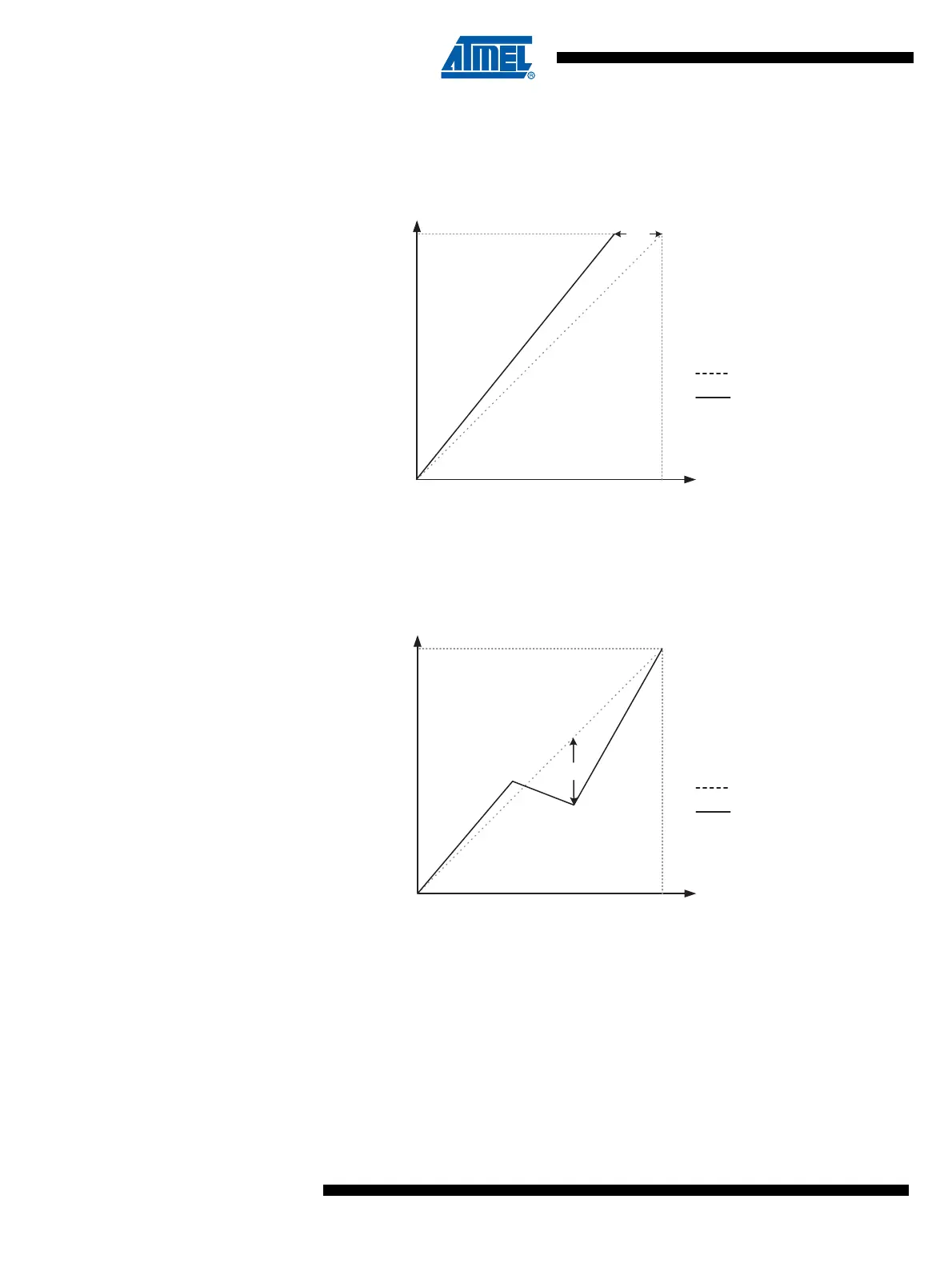
• Gain Error: After adjusting for offset, the Gain Error is found as the deviation of the last
transition (0x3FE to 0x3FF) compared to the ideal transition (at 1.5 LSB below maximum).
Ideal value: 0 LSB
Figure 18-10. Gain Error
• Integral Non-linearity (INL): After adjusting for offset and gain error, the INL is the maximum
deviation of an actual transition compared to an ideal transition for any code. Ideal value: 0
LSB.
Figure 18-11. Integral Non-linearity (INL)
• Differential Non-linearity (DNL): The maximum deviation of the actual code width (the interval
between two adjacent transitions) from the ideal code width (1 LSB). Ideal value: 0 LSB.
Output Code
V
REF
Input Voltage
Ideal ADC
Actual ADC
Gain
Error
Output Code
V
REF
Input Voltage
Ideal ADC
Actual ADC
INL

 Loading...
Loading...