www.balluff.com 13deutsch
5.1.3 Allgemeine Attribute des Position Sensor
Objects
Attribut41:
Messzustand (Operating Status)
Dieses Attribut enthält Informationen über verschiedene
Zustände des Encoders.
Bit0 zeigt die aktuelle Bewegungsrichtung an. Ist das Bit0
(FALSE) bewegt sich der Positionswert in positiver Zähl-
richtung. Ist dieses 1 (TRUE) bewegt er sich in negativer
Zählrichtung.
Bit1 zeigt an, ob die Skalierung aktiv ist. Ist dieses Bit
gelöscht, dann ist die Skalierung deaktiviert, Das
BTL7-V50D-… gibt in dem Fall Rohwerte aus. Ist das Bit
gesetzt, dann ist die Skalierung aktiviert.
Attribut 42:
Messchritte (Physical Resolution Span)
Dieses Attribut kann nur gelesen werden und gibt die
Anzahl der physikalischen Messschritte über die Nenn-
länge (in µm) zurück.
Attribut 43:
Anzahl der Umdrehungen (Number of Spans)
Da das Position Sensor Object auch für Drehgeber gültig
ist, steht hier die Anzahl der Umdrehungen. Beim
BTL7-V50D-… wird immer 1 zurück gegeben. Das Attribut
kann nur gelesen werden.
Attribut 44:
Alarme (Alarms)
Das Attribut Alarms zeigt an, ob eine Fehlfunktion auftritt,
die die Bestimmung des Positionswertes stört. Der Alarm
bleibt aktiv, bis der Fehler beseitigt ist und das Gerät
wieder einen gültigen Positionswert liefert. Das einzige
aktive Bit ist das Flag Position Error. Es wird gesetzt wenn
eine Positionsbestimmung nicht möglich ist. Dies ist z.B.
dann der Fall, wenn sich der zugehörige Positionsgeber
nicht mehr im Messbereich befindet.
Im Flexible Magnet Mode werden alle Positionen für eine
definierte Zeit ungültig, wenn sich die Anzahl der Positions-
geber ändert. In diesem Fall ist auch Position Error
gesetzt.
5
Konfiguration und Parametrierung (Fortsetzung)
5.2 Attribute des Gerätekonfigurationsobjekts
Im Gerätekonfigurationsobjekt werden generelle Einstellun-
gen des Sensors vorgenommen. Es ist ein herstellerspezifi-
sches Objekt mit nur einer Instanz.
Für eine Übersicht der Attribute siehe Attribute des Gerä-
tekonfigurationsobjekts (class 100 (0x64)) im Anhang auf
Seite34.
5.2.1 Einstellungen für den synchronen Betrieb
Das BTL7-V50D-… kann im synchronen Betrieb arbeiten,
in dem die internen Messungen taktsynchron ausgelöst
werden. Dazu müssen die Zeitparameter eingestellt wer-
den.
CIP-Sync aktivieren (Synchronous Mode)
Ist dieses BOOL auf TRUE gesetzt (1), dann arbeitet das
BTL7-V50D-… im synchronen Modus. Dazu müssen die
Parameter Synchronous Period, Synchronous Shifttime
und Synchronous Offset richtig eingestellt sein und die
Ansteuerung von Seiten der Steuerung im richtigen Takt
erfolgen.
Synchronous Period, Synchronous Shifttime und
Synchronous Offset
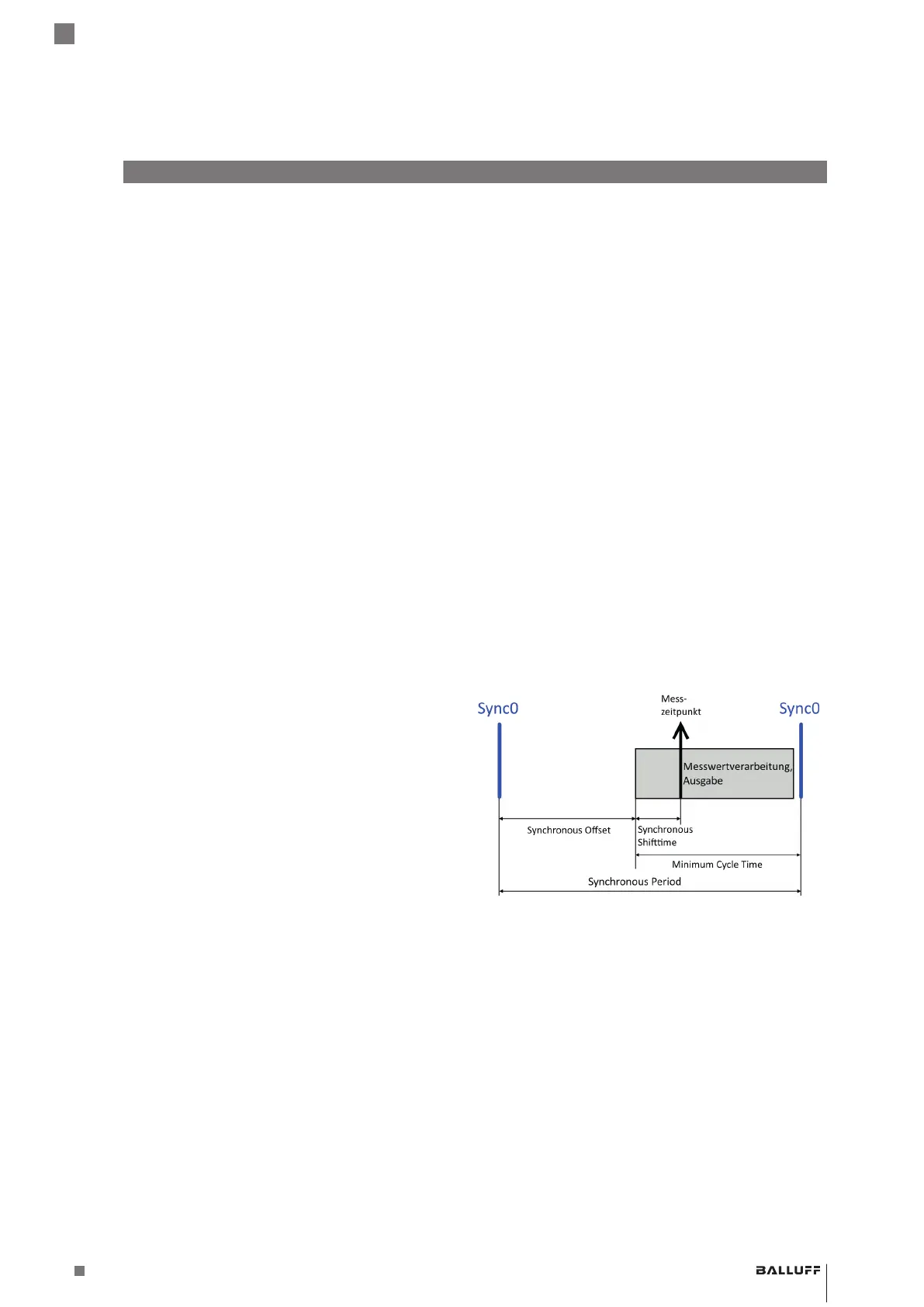
Bild 5-1: Taktsynchronisation
Für die Taktsynchronisation durch CIP Sync werden durch
einen internen Timer sogenannte Sync0-Impulse erzeugt.
Für den zyklischen, taktsynchronen Betrieb muss das
BTL7-V50D-… die erwartete Synchronous Period (siehe
Bild 5-1) kennen.
Mit Attribut4 Synchronous Offset kann der Beginn der
internen Messprozedur in Bezug auf den Sync0-Zeitpunkt
verschoben werden. Im internen Messprozess kann über
Synchronous Shifttime noch eine weitere Verzögerung
eingestellt werden. Zu diesem Zeitpunkt erfolgt die Erfas-
sung der Position. Zusammen mit der Zeit für Messwert-
verarbeitung und Ausgabe ergibt sich die Minumum Cycle
Time.
Die Werte der Attribute 2 bis 5 werden haben die Einheit
Nanosekunden (ns).
BTL7-V50D-…
Konfigurationshandbuch

 Loading...
Loading...