www.balluff.com 33english
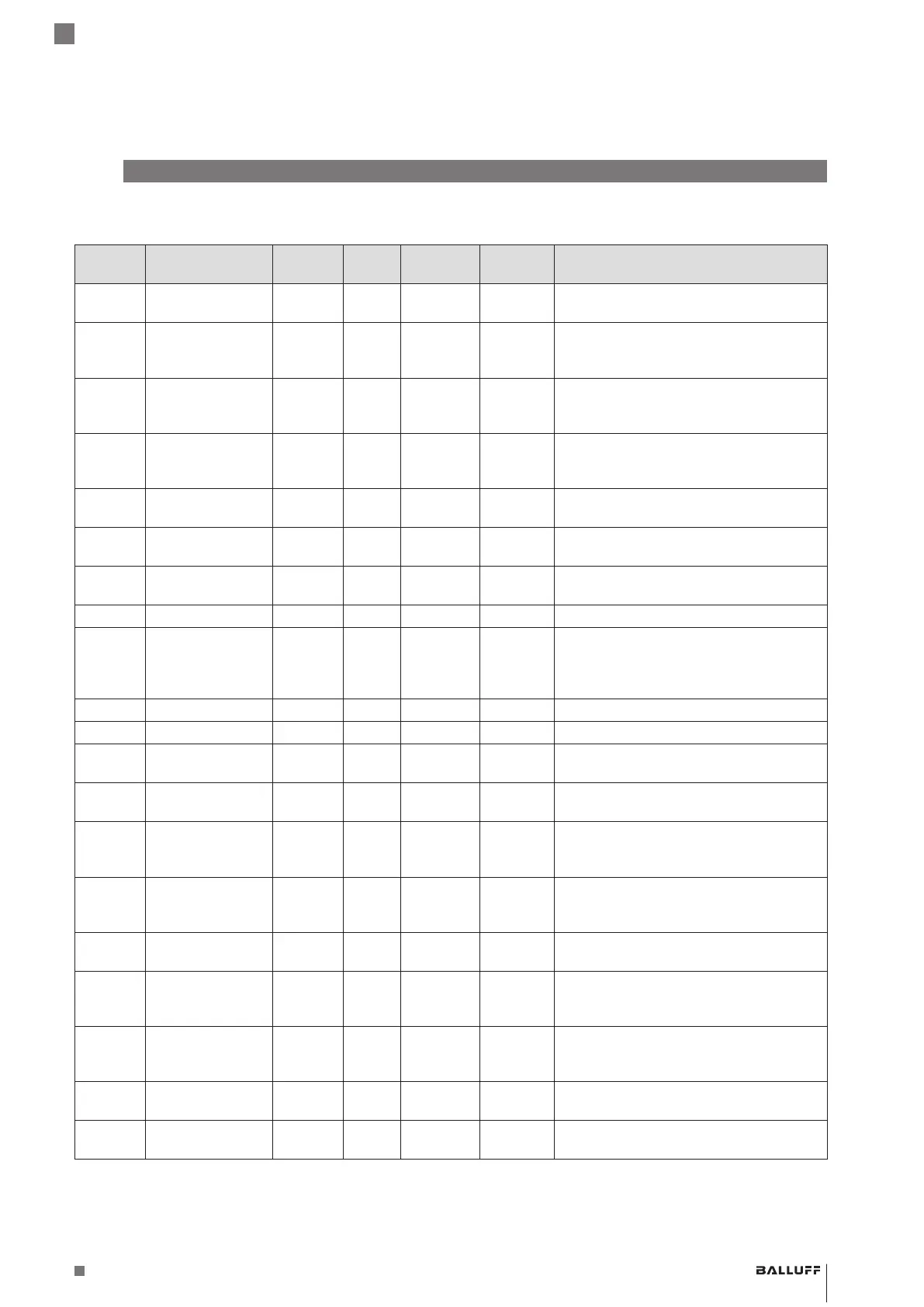
9.2 Attributes of the Position Sensor Object (class 35 (0x23))
Attribute Designation Access
1)
M
1)
Type Default
value
Comments
10 Position Value
Signed
R V DINT – Current position value
12 Direction Counting
Toggle
W NV BOOL FALSE Measurement direction reversal:
– FALSE: Minimum on the connector side
– TRUE: Maximum on the connector side
14 Scaling Function
Control
W NV BOOL FALSE Scaling function:
– FALSE: Normal operation (active)
– TRUE: Scaling deactivated
15 Position Format W NV ENGUNIT Counts Format of position value: 0x1001:counts;
0x2202:cm; 0x2203:mm; 0x2204:μm;
0x2205:nm; 0x2207:inch
16 Measuring Units
Per Span
W NV UDINT – Number of steps over the nominal
measurement range.
18 Position Measuring
Increment
W NV UDINT – Increment of the output position value.
See attributes 15, 16 for basic increment
19 Preset Value W NV DINT 0 The offset is set so that the original position
value corresponds with the value set here
24 Velocity Value R V DINT – Current speed value
25 Velocity Format W NV ENGUNIT Counts/s Format of velocity value:
0x1F04:cps; 0x2B00:m/s; 0x2B01:cm/s;
0x2B02:km/h; 0x2B06:Feet/s;
0x2B07:Inch/s
26 Velocity Resolution W NV UDINT 1 Increment of the output speed value
41 Operating Status R V BYTE – Operating mode of the encoder
42 Physical
Resolution Span
R C DINT – Physical resolution (steps) over the nominal
length
43 Number of Spans R C UINT 1 For rotary encoders: Number of turns.
Always 1 in this case
44 Alarms R WORD – Bit 0: Position Error
(0: OK; 1: Position Error)
Bit 1…7: Not in use
45 Supported Alarms R C WORD 1 Bit 0: Position Error
(0: OK; 1: Position Error)
Bit 1…7: Not in use
46 Alarm Flag R BOOL – FALSE: OK (no error)
TRUE: Position error
47 Warnings R WORD – Bit 0…9: Not in use
Bit 10: Position Limits Exceeded
Bit 11…15: Not in use
48 Supported
Warnings
R C WORD 0x200 Bit 0…9: Not in use
Bit 10: Position Limits Exceeded
Bit 11…15: Not in use
49 Warning Flag R BOOL – FALSE: OK (No Warnings)
TRUE: Position Limits Exceeded
51 Offset Value R DINT 0 Calculated offset by setting attribute19
(Preset Value)
1) C= Constant (constant value), M= Memory, NV= Non-Volatile
(remanent saving), R= Read, V= Volatile (no saving), W= Write
Tab. 9-2: Attributes of the Position Sensor Object
9
Appendix (continued)
BTL7-V50D-…
Configuration Manual
 Loading...
Loading...