AW00118508000 Pixel Formats and Tap Geometries
Basler racer Camera Link 98
7.2 Camera Link Tap Geometry
The Camera Link tap geometry determines how the data that is read out of the imaging sensor will
be transmitted from the camera to the frame grabber in your host computer via the Camera Link
interface. The selection of a camera link tap geometry also determines whether your camera will be
operating in the base, medium, or full Camera Link configuration and which Camera Link
connectors on the camera will be used to transmit pixel data. Table 17 indicates how the Camera
Link interface will operate with each available tap geometry setting.
The e.g. X2, X4, or X8 in the tap geometry names indicates the number of Camera Link taps that
will be used for a given configuration (e.g., X2 means 2 taps, 1X uses one tap). As a general rule
of thumb, a camera will have a higher maximum allowed line rate when it is operating with a tap
geometry that uses more Camera Link taps.
For a description of tap geometries refer to the Basler document named racer Camera Link
Information for Frame Grabber Designers (AW001187). You can obtain the document from the
camera’s Downloads section of the Basler website: www.baslerweb.com
Tap Geometry Setting Camera Link Configuration Camera Link Connectors
Used to Transmit Data
1X Base Base Only
1X2 Base Base Only
1X4 Medium Base and Medium/Full
1X8 Full Base and Medium/Full
1X10 Full Base and Medium/Full
Table 17: Camera Link Operation at Various Tap Geometry Settings
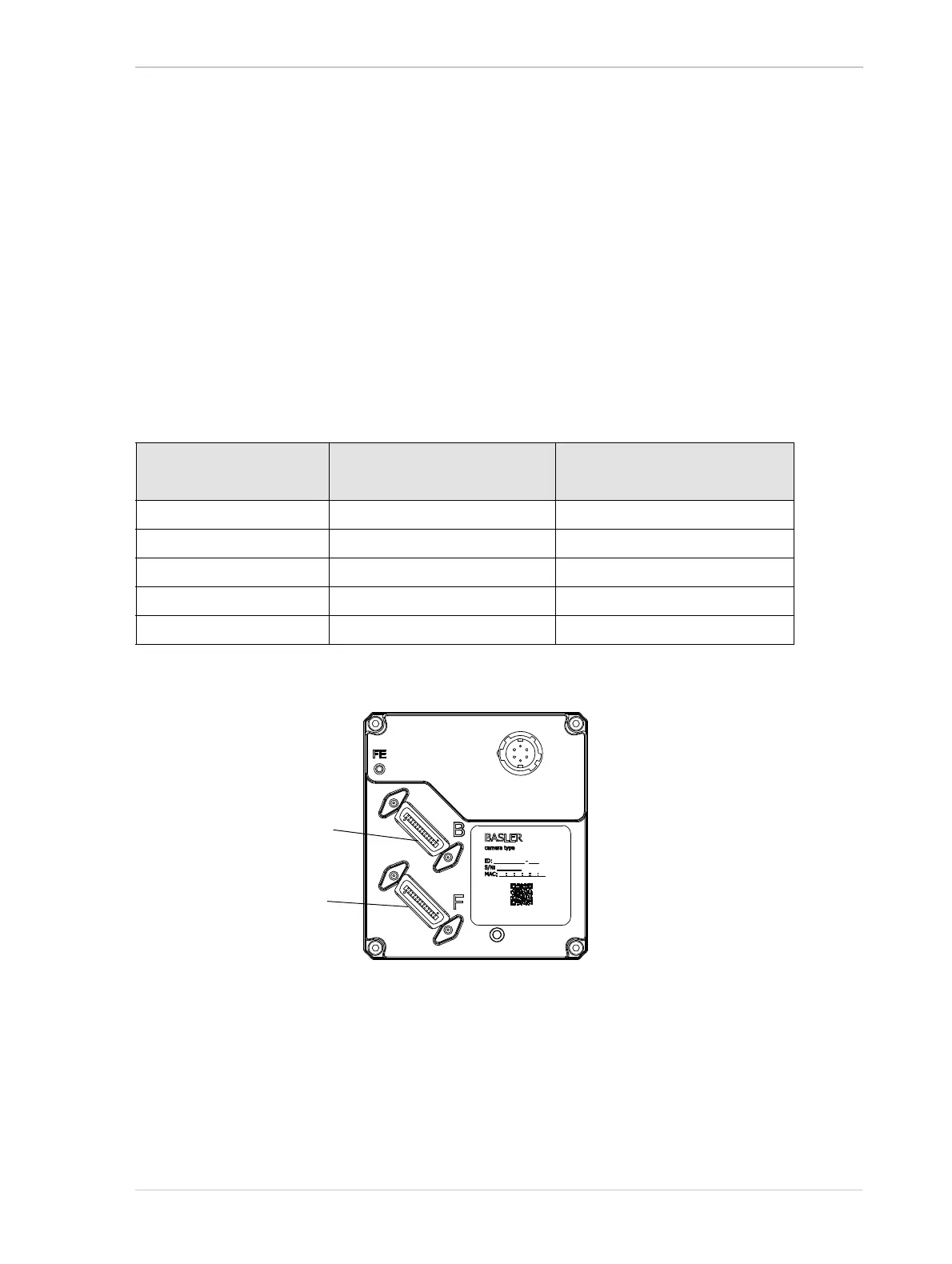
26-pin
SDR Connector
(Base Camera
Link Connection)
Fig. 31: Camera Link Connections
26-pin
SDR Connector
(Medium/Full Camera
Link Connection)