Limitations and recommended settings
As stated the use of distributed clock should normally be disabled for the CODESYS runtime.
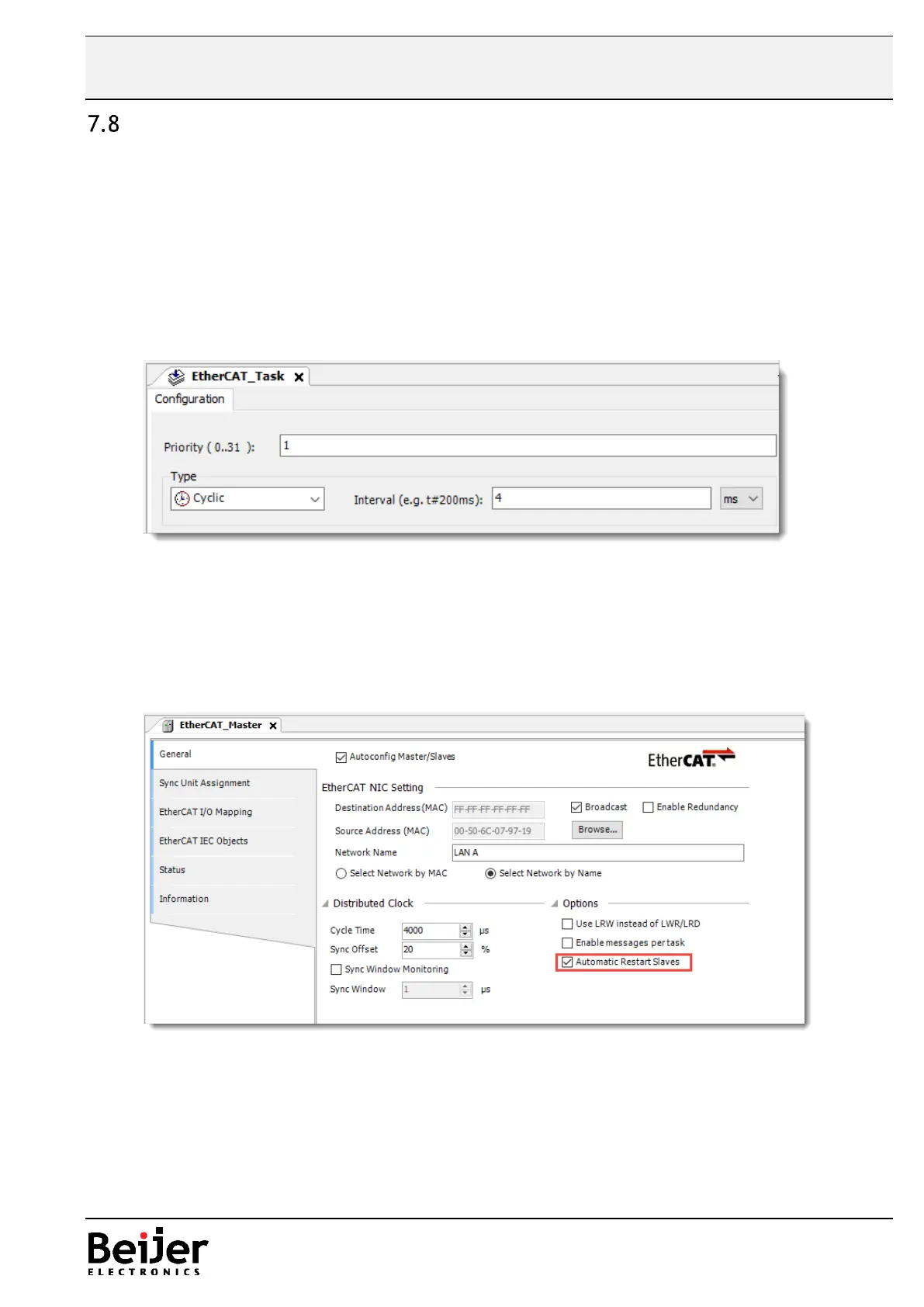
The EtherCAT task which will be inserted in the project when adding the EtherCAT driver
should have the following settings:
• Highest priority, 0.
• Cyclic with an interval of 4 ms. (The interval should be adjusted to a higher value if the over
all load on the cpu core 1 is higher than 70-75%)
• Use this task for the associated POU:s
Note! The maximum amount of slaves is 50 devices at a cyclic interval of 4 ms.
If the cpu load of core 1 (CODESYS core) exceeds a value of 70-75% changes must be made to
lower the load as for example increasing the interval time for the task.
If a slave disconnects and the desired function is that the EtherCAT master should connect to it
automatic once available the “Automatic restart of slaves” option should be enabled