User’s Guide
5. Using Sensors
A robot cannot truly be a robot if it simply moves by remote control. A robot has
to be able to move and do things all by itself. The most important thing in making
a robot autonomous is to give it the ability to sense and gather information. For
example, if you want to build a robot that can avoid obstacles, the robot would
first need to have the ability to sense the obstacle.
A device that can sense information is called a sensor. A sensor not only has the
ability to sense objects, but also people or other robots. The process of a robot
sensing outside information and reacting to it via outputting a movement is called
robot interaction.
TIP The interaction between a robot and human is called HRI (Human-Robot
Interaction). Voice and face recognition is also part of HRI. In order to have robots
live with humans, the advanced HRI development is essential
5-1. The AX-S1 Sensor Module
Earlier, we have created a program that controls the robot behavior based on the
robot’s input and output. The output items that we have tested were LED, motor
position, and printing on screen. The input items we have used were mostly using
buttons. In this chapter we will learn more input items using the sensor module
AX-S1.
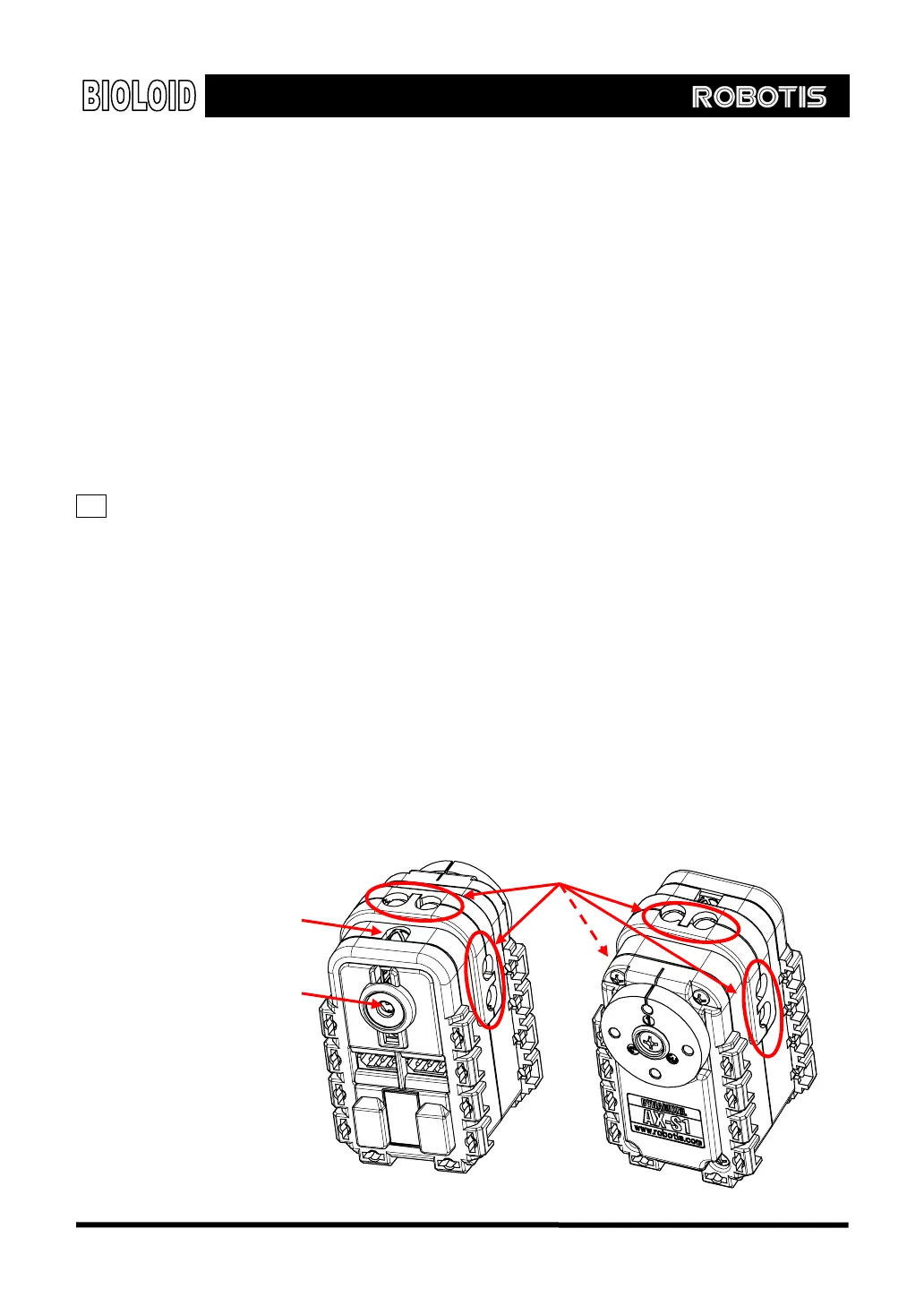
The figure below shows the AX-S1. The AX-S1 has a distance sensor (3
directions), sound sensor, remote control receiver, and a buzzer.
Distance sensor area
Remote control
receiver area
Sound sensor
area
56
[External view of the AX-S1 module: Top view, bottom view]