User’s Guide
5-4. Assembling Attacking Duck that Uses Sensor
We are now going to build a very interesting robot. Let’s make a duck robot that
attacks an object that approaches it.
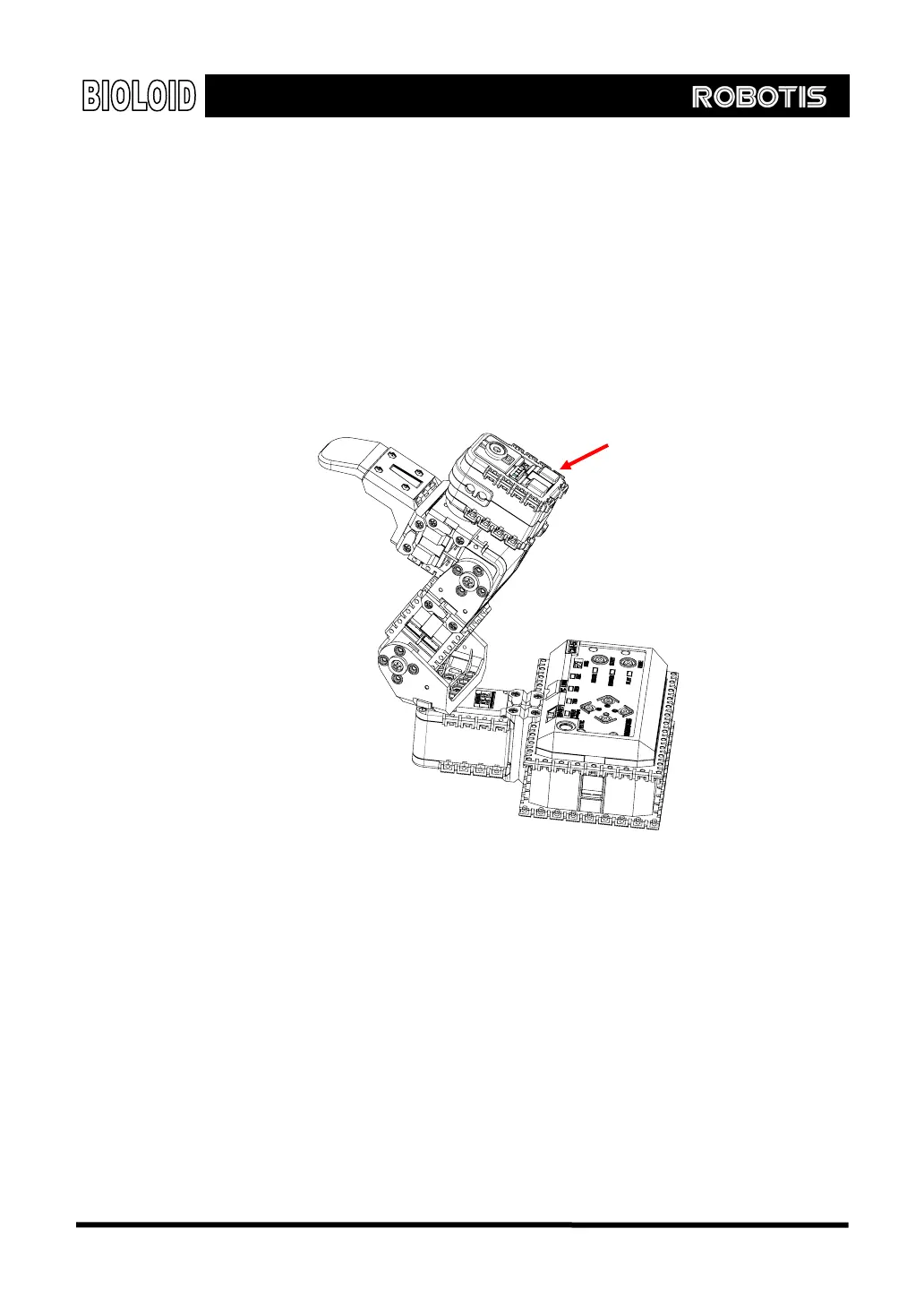
Attach an AX-S1 unit to the robot arm built in chapter 3 as shown in the figure
below. Refer to the “2-2-11. Attacking Duck” of QuickStart whenever it is
necessary.
AX-S1
Caution While working with the robot never put your face close to the robot.
The behavior control of above can be divided into the following.
Set the max joint speed to 128 and torque limit to 256.
Implement arm bending motion.
Repeat the two functions below.
If the value of the distance sensor is greater than 30, move joint number 4
towards the sensed direction.
If the value of the distance sensor is greater than 120, then straighten the joints
for number 5 and number 6 and then bend them back.
59