User’s Guide
6-3. Walking Droid ’s Program
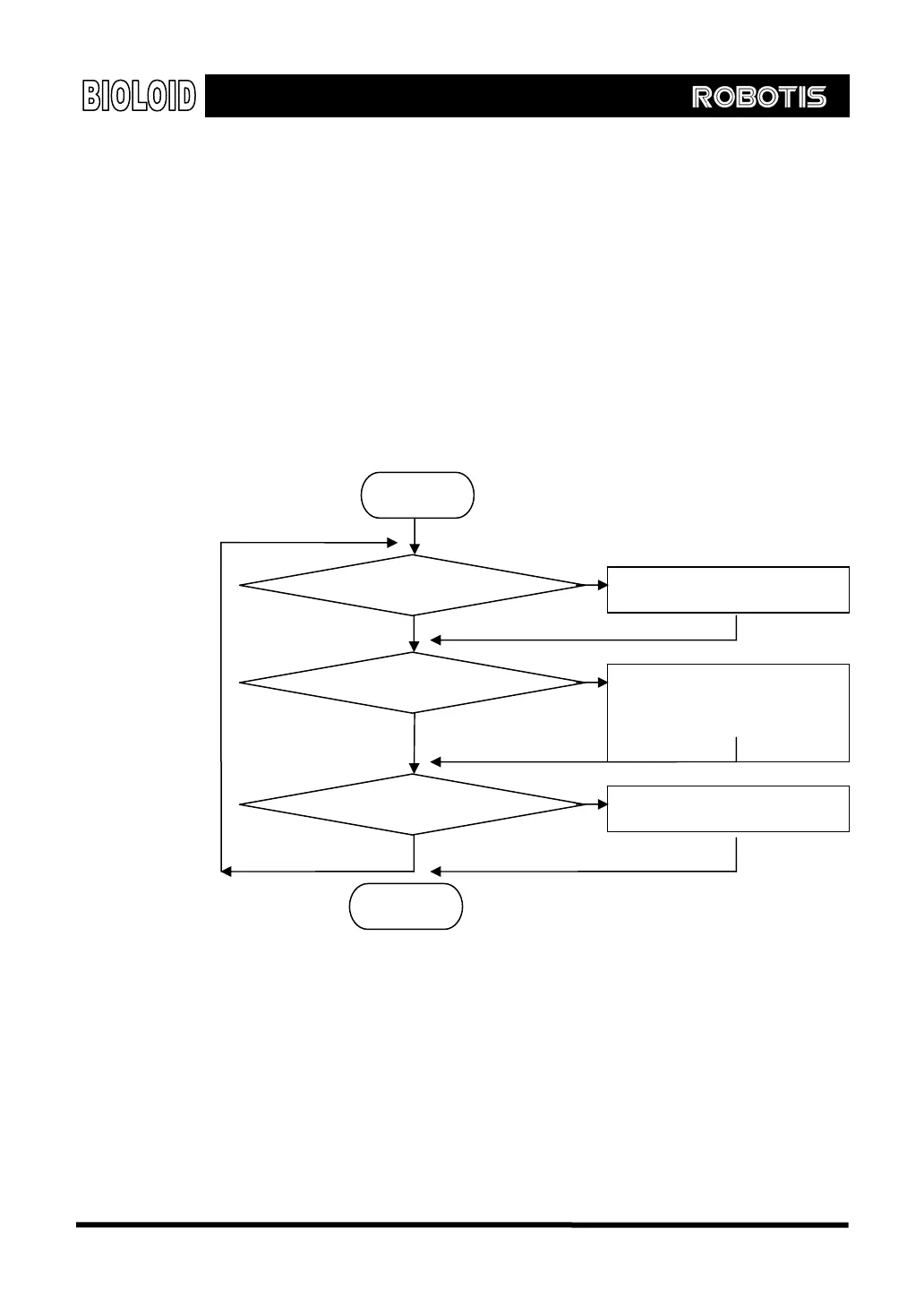
Now let’s build a walking droid as follows.
When an object is sensed by center sensor, the robot will move forward.
When handclapped, walking droid will stamp its feet corresponding to a number
of handclaps.
When “Start” button is clicked, the robot will dance.
Let’s look at the flow chart below.
At first behavior control program does not seem to have any problems with it. But
there will be several problems when you run it as is.
The first problem is the position configuration of the humanoid robot when the
program is started. The robot could be in a pose which will make it difficult to
execute a certain motion. Thus it needs a motion to make the humanoid robot
stand straight upright.
Start
End
Center sensor value> 100 ?
Number of sound sensing event !=0
Button status = Start button ?
Execute forward motion
Repeat feet stamping motion
corresponding to the number
sound sensing event
Execute dance motion
Yes
No
Yes
No
No
Yes
91