Installation Atmospheric Single-Arm Robot
Setup User’s Manual
Brooks Automation
3-18 Revision 1
Setup
Before the Atmospheric Single-Arm Robot is started for the first time, or after servic-
ing the product, it is necessary to verify that it has been properly configured for oper-
ation.
Verifing Connections
When any cable between the robot and the controller or any cable within the control-
ler is disconnected, the I/O board registers the broken connection(s) on its Port G.
After making the connection, check the status of Port G with the command:
INPUT G
The INPUT command reads the value of the specified port and sends the results over
the RS-232 line. If you send the command from the Teach Pendant, the results are dis-
played on the LCD screen. If you send the command from EQT 32, the results are dis-
played on the command line.
The INPUT command returns two hexadecimal digits that must be interpreted into
eight binary bits. A result of all zeroes indicates a good condition. If any 1s are
returned, refer to the bit descriptions for Port G to determine what the problem is.
Alternatively, you can read a specific bit rather than all eight bits (two hexadecimal
digits). For example, to read Bit 2 of Port G, enter:
INPUT 10
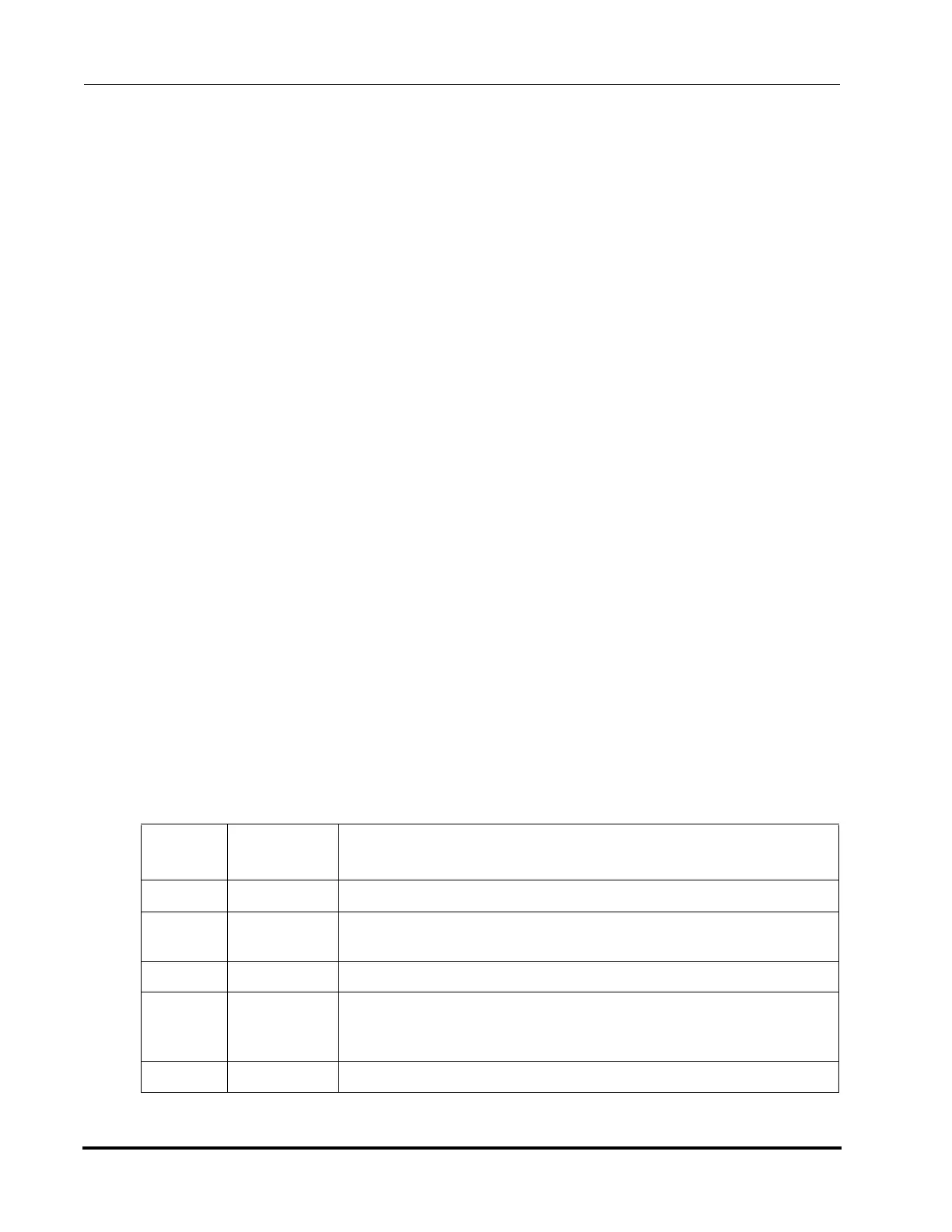
In the following table, Bits 0 through 2 indicate cable connections between the robot
and the controller. Bits 3 through 7 indicate cable connections within the controller.
Table 3-1: Cable Connections
Bit on
Port G
INPUT
Command
Description
0 INPUT 8 Amplifier internal connection and signal cable closed loop
1 INPUT 9 EMS, emergency stop (MOFF or motor off), input from customer I/O
connector on the robot I/O card.
2 INPUT 10 Stop input from the customer I/O connector on the robot I/O card.
3 INPUT 11 Amplifier board under power. 0 indicates amplifier power supply ok.
1 indicates amplifier board is not receiving enough voltage from the
linear power supply.
4 INPUT 12 Motor power supply indicator.
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com
 Loading...
Loading...