[SMB-66E]
- 60 -
0
゚
0
゚
②
゚
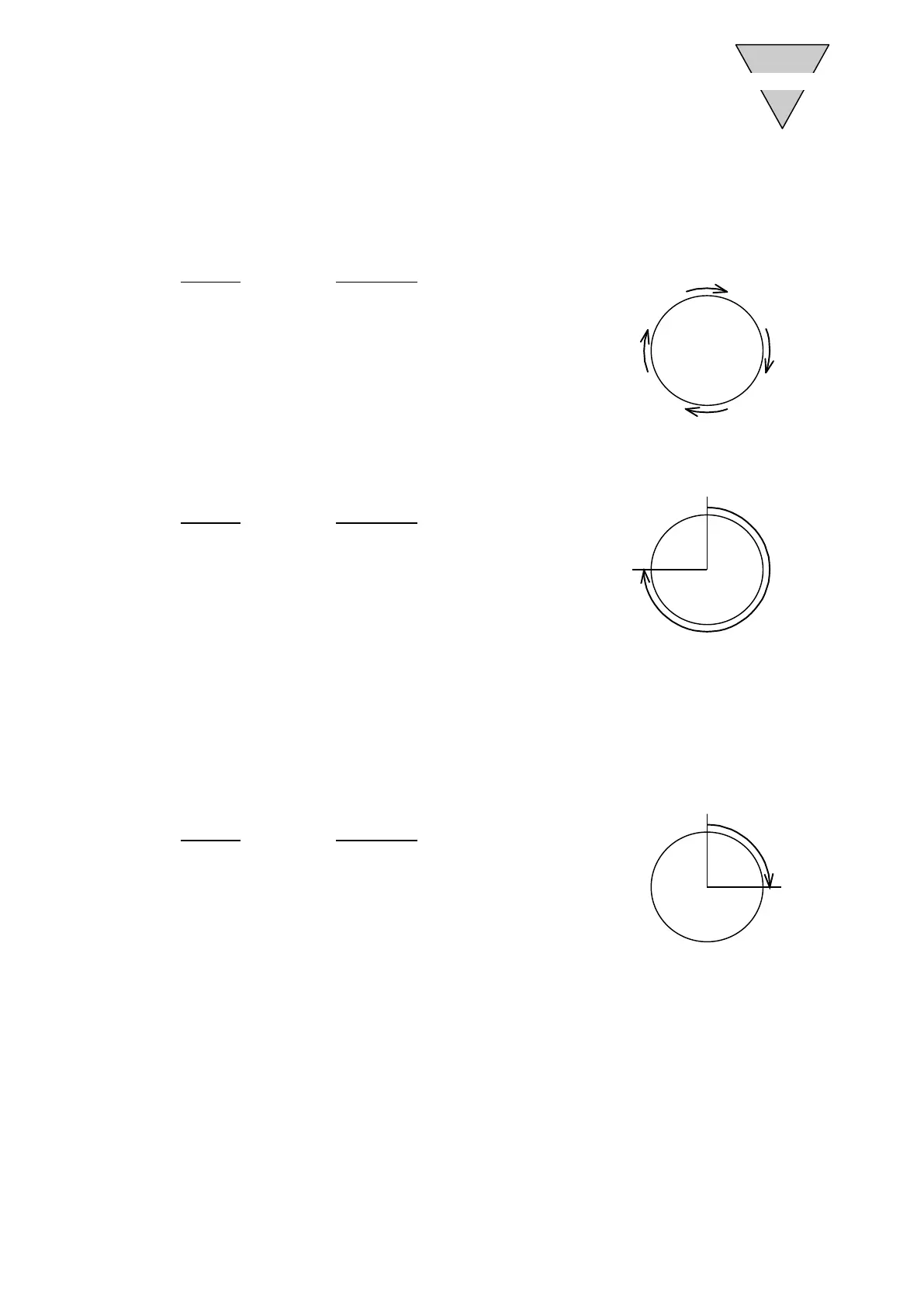
5) Continuous rotation (G07), continuous rotation acceleration time (G08), continuous rotation
deceleration time (G09)
After supplying a start signal, rotate at the rotation speed specified with G07.
The acceleration/deceleration time at the time follows the settings of G08 and G09.
Program
Explanation
N1G105; ①Angle designation
N2G08P1; ②Acceleration in 1 sec.
N3G09P0.5; ③Deceleration in 0.5 sec.
N4G07A10; ④Continuous rotation 10rpm
N5M30; ⑤End of program
6) Rotation speed designation (G10)
Specify the unit of F at the maximum rotation speed.
Program
Explanation
N1G90G105G10; ①Absolute, angle, rotation
speed
N2A271.23F30; ②Travel to the 271.23° position
at 30rpm.
N3M30; ③End of program
※
※※
※ If the rotation speed is high and the traveling amount
is smaller, the acceleration may become too large to cause alarm 1 (position deviation over).
If this happens, use MC2 cam curve.
7) Gain multiplication change (G12), dwell (G04)
Use the gain multiplication change function to index and turn the servo off.
Program
Explanation
N1G90.1G105G11; ①Full revolution absolute, angle, time
N2A90F1; ②Travel to the 90° position in 1 sec.
N3G04P0.2; ③Dwell 0.2 sec.
N4G12P0; ④Change the gain multiplication to 0%
(servo-off).
N5M30; ⑤End of program
※
※※
※ In the program executed after the servo is turned off, a gain multiplication change command
such as "G12P100" is necessary before the travel instruction so that servo-off is reset.
0
゚
②
③④
゚
off.
 Loading...
Loading...