[SMB-66E]
- 61 -
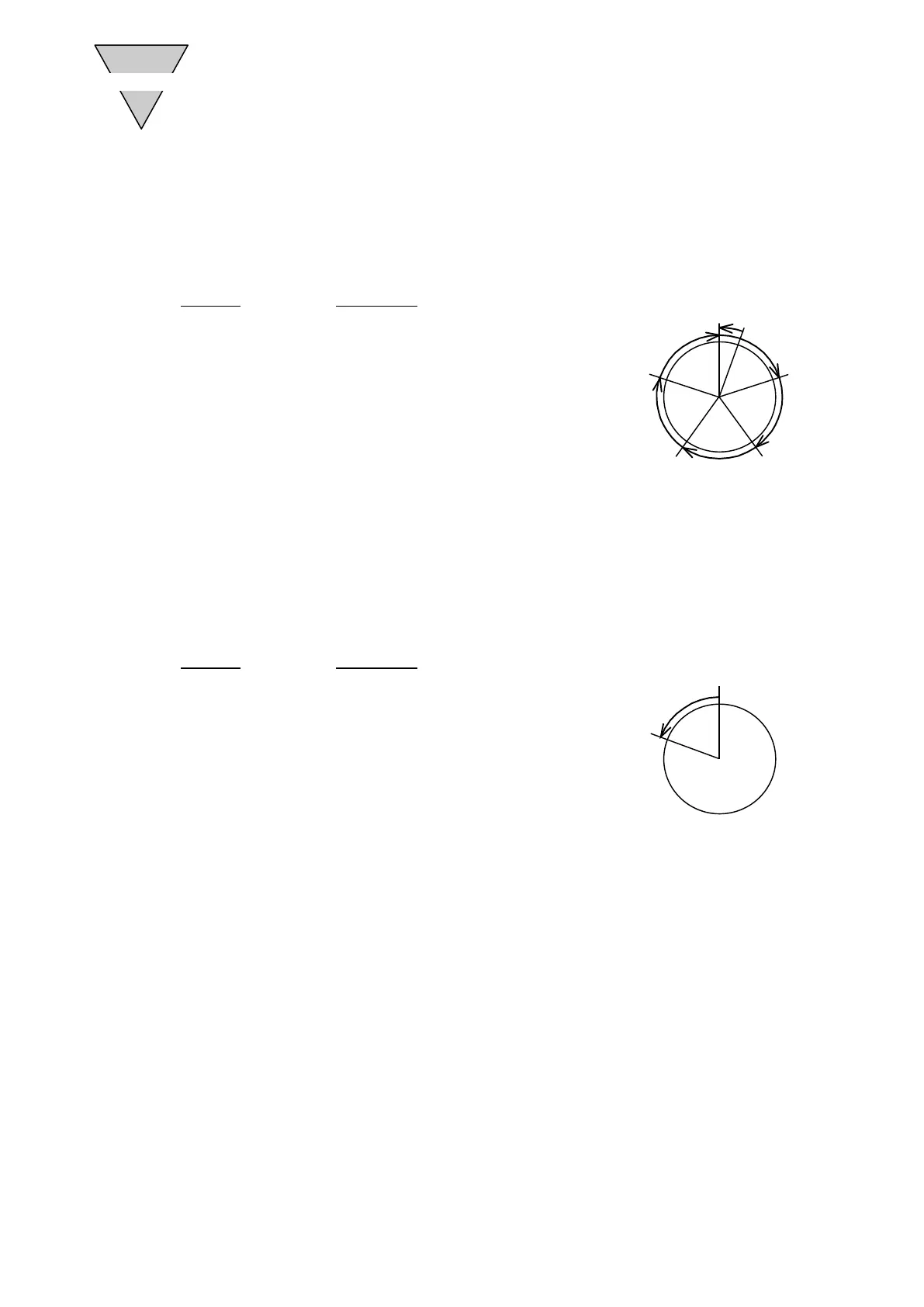
8) Segment number designation (G101), segment position output (M70), start input wait (M0) and
jump (J)
After indexing into equal segments, use a segment position output to output the current position to
an external programmable logic controller in a binary format.
Program
Explanation
N1G101A5; ①Segment number designation, 5 segments
N2G11; ②Time designation
N3G91A0F1; ③Travel to the nearest indexing position
in 1 sec.
N4M70; ④Segment position output
N5M0; ⑤Start input wait
N6G91.1A1F1; ⑥Travel clockwise by a segment in 1 sec.
N7M70; ⑦Segment position output
N8M0; ⑧Start input wait
N9J6; ⑨Jump to sequence No. 6
N10M30; ⑩End of program
9) Brake application (M68), brake release (M69) and M code output
Control the brake of ABSODEX equipped with a brake. Issue an M code after an action to notify
the external programmable logic controller of completion of the action.
Program
Explanation
N1G90. 1G105G11; ①Full revolution absolute, angle, time
N2M69; ②Release the brake.
N3A-70F0. 5; ③Travel to the -70° position
in 0.5 sec.
N4G04P0. 1; ④Dwell 0.1 sec. (Note)
N5M68; ⑤Apply the brake.
N6M20; ⑥Output M code bit 0.
N7M30; ⑦End of program
Note : The dwell after the indexing cycle is added to settle at the target position.
The settling time is about 0.05 to 0.2 sec. though it varies according to the operation conditions.
When the brake is used, position deviation may result due to a timing issue of brake application.
The positioning completion signal is issued after the in-position range and sampling frequency
conditions specified in parameters are satisfied.
④⑦
③
⑥
⑦
⑥
⑦
⑦
⑦
⑥
⑥
⑥
0
゚
②
indexing.
④⑤⑥
-
brake.
③
 Loading...
Loading...