Midi-Maestro and Maxi Maestro Drive
16
Example 3
To calculate a value for
RIN for Model 140 × 8/16 for 5A
nominal current.
(())
(())
RIN =
1000 5
[(0.1925 16) - 0.385 5
××
××××
==
]
4329ΩΩ
Where:
5 is the required nominal current
16 is the theoretical peak current of the Drive
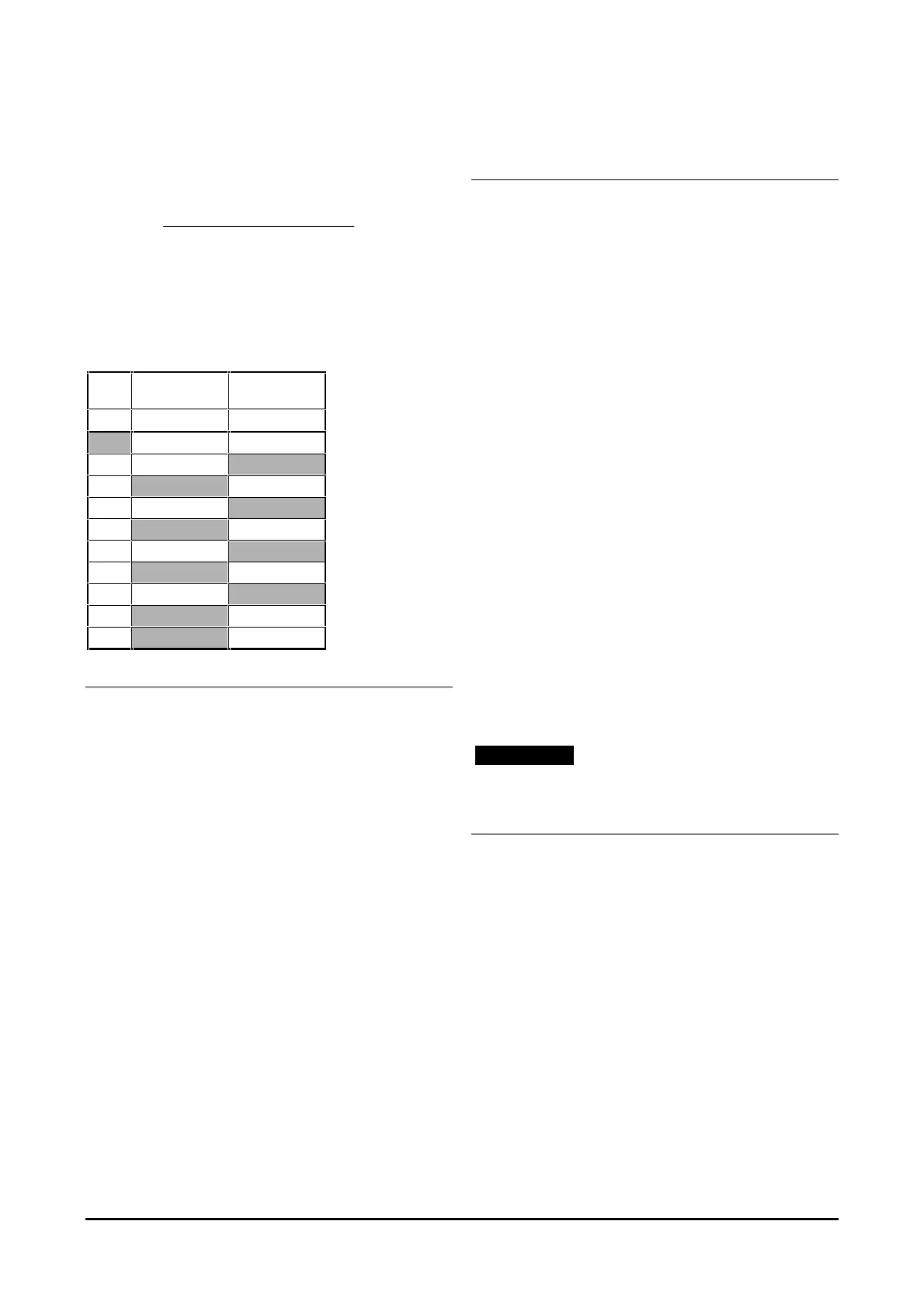
The following table may be used for finding an
approximate value of I
NOM
.
RIN Midi-Maestro
140 ×× 8/16
Midi-Maestro
140 ×× 14/28
kΩΩ
I
NOM
I
NOM
814
18.0 7
15.0 12
7.5 6
6.8 10
4.7 5
3.3 8
2.7 4
1.8 6
1.0 4
Adjusting tacho loss protection
RRT resistor
1. Set Switch 3 at
ON to enable tacho loss protection.
2. Use the following equation to calculate the correct
value for the
RRT resistor:
RRT Vm Ke==××××−−××[( . ) ]0 068 1 183000
Where:
Vm = Maximum speed in
RPM÷1000
Ke = Motor voltage constant (voltage at 1000
RPM,
in general V × 1000÷
RPM)
Example 4
Max speed =
3000 RPM
Vm = 3
Motor voltage constant (at 1000
RPM), Ke = 15
RRT ==××××−−××==[( . ) ]0 068 3 15 1 183000 376980ΩΩ
Adjusting speed for operation in
armature feedback mode
RKW resistor
Armature feedback mode can be used when a
tachogenerator is not fitted to the motor. Speed
control is then less precise. Speed is controlled by
using the motor voltage as feedback.
Voltage drop due to motor resistance can be
compensated by adjusting the value of the
RAI resistor.
1. Set Switch 1/2 at
OFF to enable operation with
armature feedback.
2. Set Switch 3 at
OFF to disable tachogenerator loss
protection.
3. Use the following equation to calculate the correct
value of
RKW resistor:
RKW Vm Ke==××××132
Where:
Vm = Maximum speed in
RPM ÷1000
Ke = Motor voltage constant (voltage at 1000
RPM
— in general V × 1000 RPM)
4. Calculating the value of the
RAI resistor can be
difficult since it is a function of the following:
• Motor characteristics. (eg. armature resistance
and temperature).
• Brush resistance (changing with wear)
An approximate value may be found
experimentally using a
RAI resistor value of
400kΩ to 600kΩ.
Caution
Too low a value for the RAI resistor may modify the
velocity loop response. For guidance, contact Control
Techniques.