Midi-Maestro and Maxi Maestro Drive
19
V
t
V
t
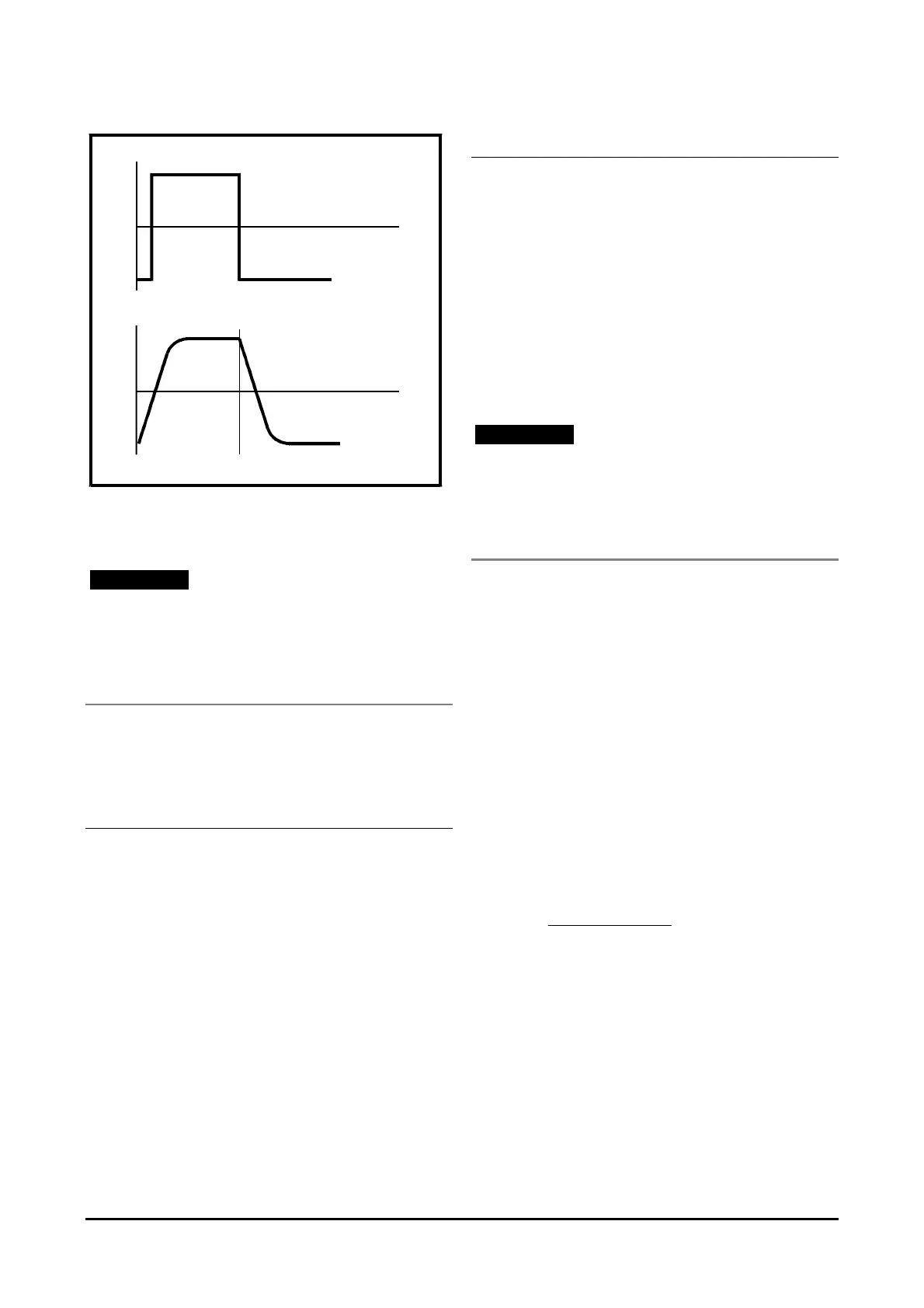
Function generator
output
Tachogenerator
Figure 21 Waveform resulting from excessive
derivative gain
Note
It may be necessary to adjust repetitively the
PROPORTIONAL and DERIVATIVE potentiometers.
If the Drive has instability problems after adjustment
and when it is connected to a position controller, refer
to Commissioning and Diagnostics.
Making adjustments to the
Maxi-Maestro Drive
Zero speed offset
ZERO REF potentiometer
1. Connect the non-inverting speed reference signal
input to pin 9 and the inverting input to pin 10.
2. Set the speed reference signal for zero speed.
3. Remove the connection from pin 15 (
STOP signal).
4. Connect a digital multimeter to pins 11 and 12.
5. Enable the Drive and adjust the
ZERO REF
potentiometer to reduce the multimeter reading to
not more than 1mV.
6. Restore the original wiring.
Maximum speed
RT resistor
Use the following equation to calculate the value of the
RT resistor:
RT Vm Ke
== ×× −−
200 5[( ) ]
Sort this equatio out same as the others
Where:
Vm = Maximum speed of motor in
RPM ÷ 1000
Ke = Tachogenerator voltage constant
Resistor ratings:
Power: 0.25W
Tolerance: ±5%
Note
If the calculated value of RT is zero, it is necessary to
fit a link instead of a resistor.
If the calculated value is negative, the tachogenerator
must be changed for one with a greater value of Ke in
order for the motor to reach the required speed.
Example 1
Max required speed = 3000
RPM
Tachogenerator output = 7V at 1000 RPM
1. Calculate:
RT K
==××−−==
200 3 7 5 3 2[( ) ] .
ΩΩ
The value of the RT resistor must be between
2.7kΩ and 3.9kΩ.
2. Fit the resistor.
3. Apply a 2V to 10V speed reference signal between
pins 9 and 10. (To generate this signal, use the
external controller or the reference voltage output
on pins 6 and 7.)
4. Measure the reference signal applied to pins 9
and 10 and calculate the tachogenerator output
value using the following equation:
(())
Vdt =
RPM Vref Ke
10,000
××××
Where:
RPM = Maximum required speed
Vref = Measured reference signal
Ke = Tachogenerator voltage constant