[100] Output frequency
[101] Reference
[102] Feedback
[103] Motor current
[104] Torque rel to limit
[105] Torq relate to rated
[106] Power
[107] Speed
[108] Torque
[109] Max Out Freq
[119] Torque % lim
5-68 Pulse Output Max Freq #X30/6
Select the maximum frequency on terminal X30/6 referring to the output variable in par. 5-66
Terminal X30/6 Pulse Output Variable
. This parameter
cannot be adjusted while the motor is running.
This parameter is active when option module MCB 101 is mounted in the frequency converter.
Range: Function:
Application
dependent*
[0 - 32000 Hz]
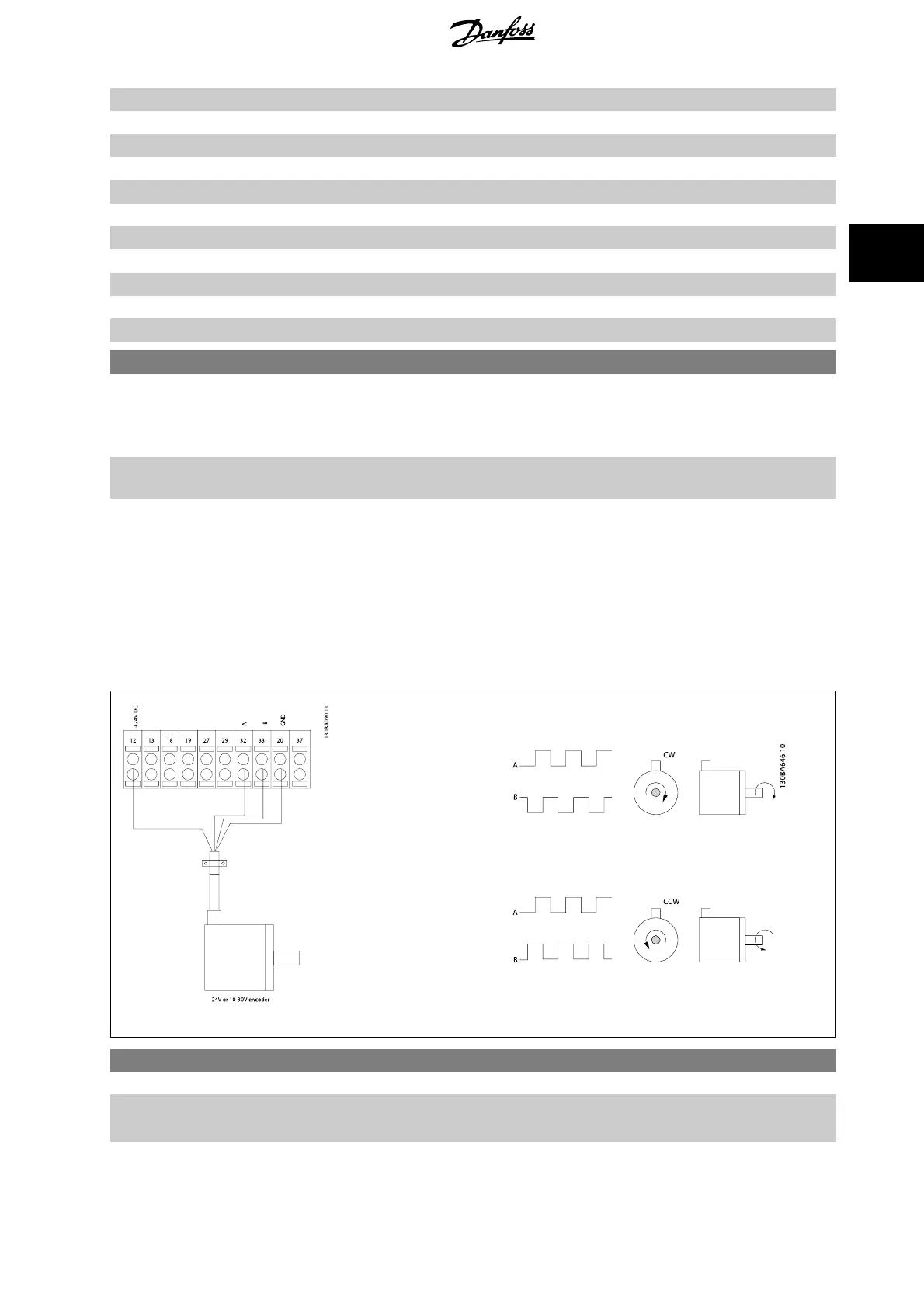
3.7.8 5-7* 24 V Encoder Input
Parameters for configuring the 24 V encoder.
Connect the 24 V encoder to terminal 12 (24 V DC supply), terminal 32 (Channel A), terminal 33 (Channel B), and terminal 20 (GND). The digital inputs
32/33 are active for encoder inputs when
24 V encoder
is selected in par. 1-02
Flux Motor Feedback Source
and par. 7-00
Speed PID Feedback Source
.
The encoder used is a dual channel (A and B) 24 V type. Max input frequency: 110 kHz.
Encoder Connection to the frequency converter
24 V incremental encoder. Max. cable length 5 m.
5-70 Term 32/33 Pulses per Revolution
Range: Function:
1024* [1 - 4096 ] Set the encoder pulses per revolution on the motor shaft. Read the correct value from the encoder.
This parameter cannot be adjusted while the motor is running.
FC 300 Programming Guide 3 Parameter descriptions
MG.33.M8.02 - VLT
®
is a registered Danfoss trademark
113
3

 Loading...
Loading...











