Par 1-55 [x]
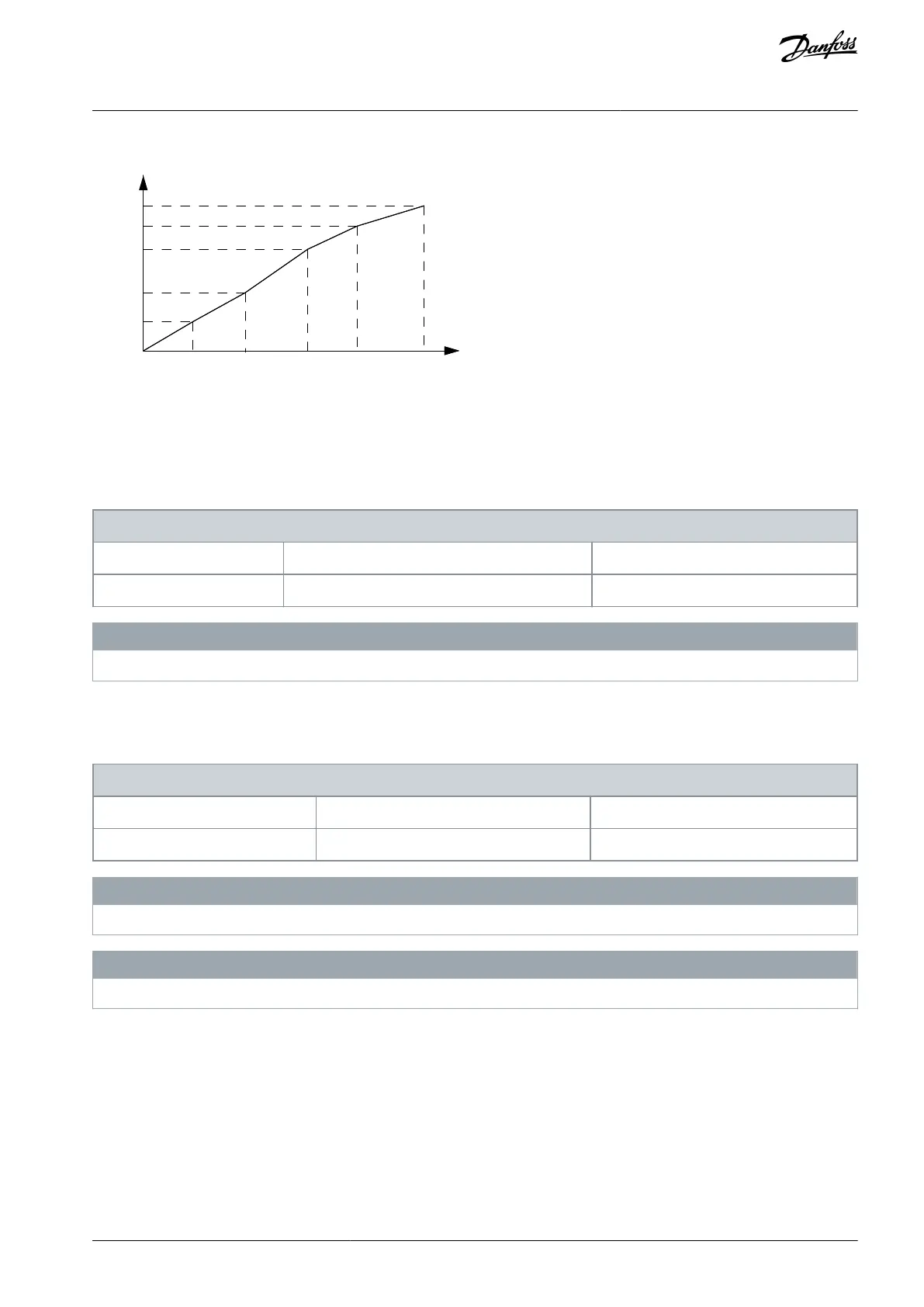
Output Frequency
Par 1-56 [x]
1-55[3]
1-55[2]
1-55[1]
1-55[0]
1-56
[0]
1-56
[1]
1-56
[2]
1-56
[3]
1-56
[4]
1-56
[5]
e30ba166.11
Illustration 36: U/f Characteristic
Parameter 1-57 Torque Estimation Time Constant
Table 108: Parameter 1-57 Torque Estimation Time Constant
1-57 Torque Estimation Time Constant
Parameter type: Range, 50 - 1000 ms
Change during operation: True
N O T I C E
This parameter is only valid with software version 48.XX.
Enter the time constant for the torque estimation below model change point in flux sensorless control principle.
Parameter 1-58 Flying Start Test Pulses Current
Table 109: Parameter 1-58 Flying Start Test Pulses Current
1-58 Flying Start Test Pulses Current
Default value: Size related
Parameter type: Range, 0 - 200%
Change during operation: False
N O T I C E
This parameter is only available in VVC+.
N O T I C E
This parameter has effect on PM motors only.
Sets the current level for the flying start test pulses that are used to detect the motor direction. 100% means I
m,n
. Adjust the value to
be high enough to avoid noise influence, but low enough to avoid affecting the accuracy (current must be able to drop to 0 before
the next pulse). Reduce the value to reduce the generated torque. Default is 30% for asynchronous motors, but may vary for PM
motors. For adjusting PM motors, the value tunes for back EMF and d-axis inductance of the motor.
AU275636650261en-000101 / 130R0334 | 91Danfoss A/S © 2022.12
Parameter Descriptions
VLT AutomationDrive FC 301/302
Programming Guide

 Loading...
Loading...












