Chapter 7 Motion Control ASDA-A2R Series
7-16 Revision December, 2014
7.8 Homing Description of PR Mode
The purpose of homing is to connect the Z pulse position of motor encoder to the internal
coordinate of the servo drive. The coordinate value corresponded by Z pulse can be
specified.
After homing is completed, the stopped position will not be the Z pulse. It is because it has
to decelerate to stop when finding the Z pulse. It might therefore exceed a bit. However,
since the position of Z pulse has correctly setup, it would not influence the accuracy of
positioning. For example, when specifying the coordinate value corresponded by Z pulse is
100 and it is Cmd_O = 300 after homing, it means the deceleration distance is 300 – 100 =
200 (PUU). Since Cmd_E = 100 (Z’s absolute coordinate), if desire to return to Z pulse
position, issuing the positioning command will do, absolute 100 command or incremental 0
command.
After homing is completed, it will execute the specified PR automatically, which can move a
distance of offset after homing.
When it is executing homing, software limit is disabled.
7.9 DI/DO Provided by PR Mode and Diagrams
DI signal:
CTRG, SHOM, STP, POS 0~5, ORG, PL(CCWL), NL(CWL), EV1~4
DO signal:
CMD OK, MC_OK, TPOS, ALM, CAP_OK, CAM_AREA
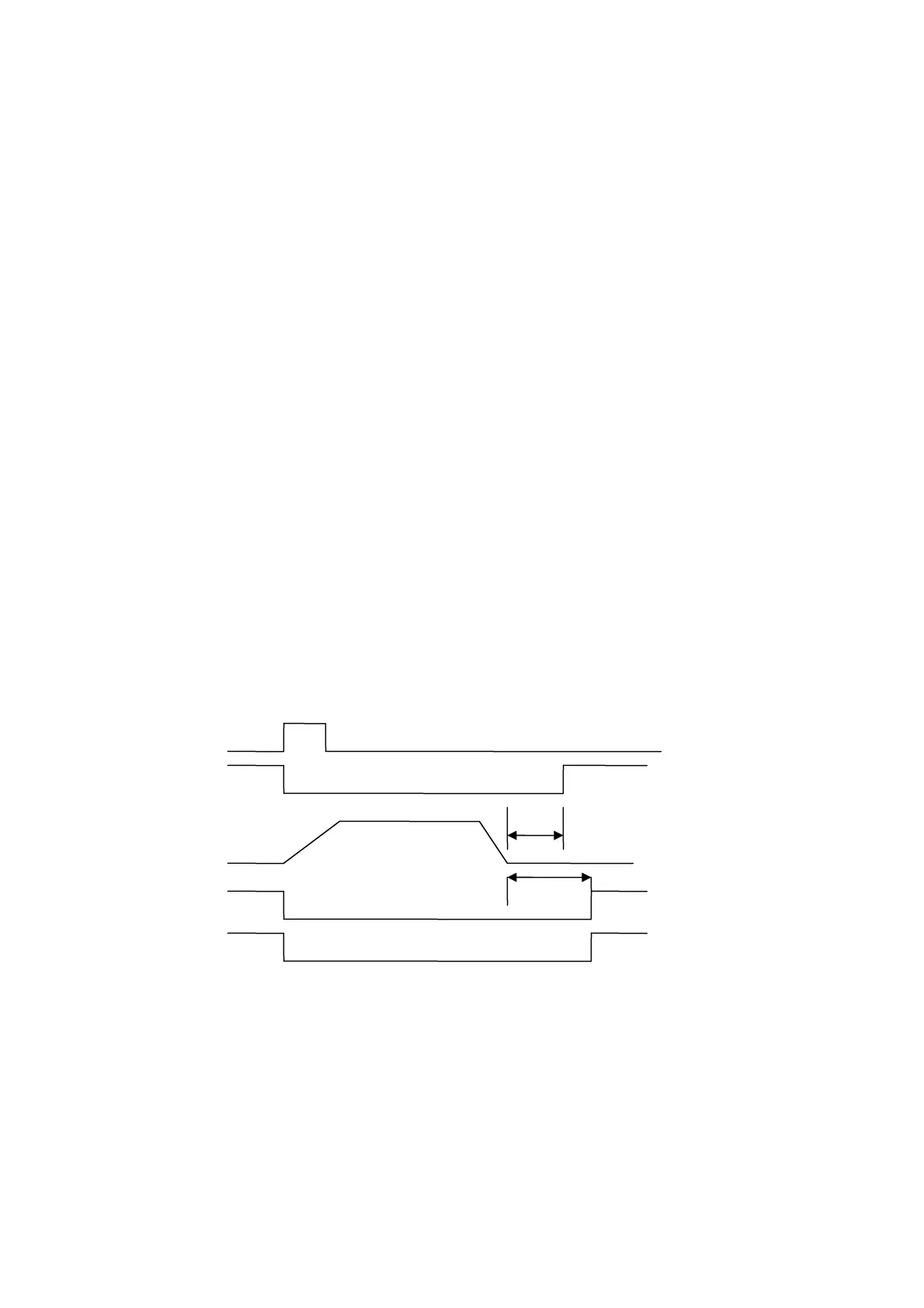
System frame:
DI.CTRG
DO.CMD_OK
Servo positioning is
completed
Command is issuing
DO.TPOS
DLY
DO.MC_OK
PR procedure is
completed.
 Loading...
Loading...
