Chapter 7 Motion Control ASDA-A2R Series
7-22 Revision December, 2014
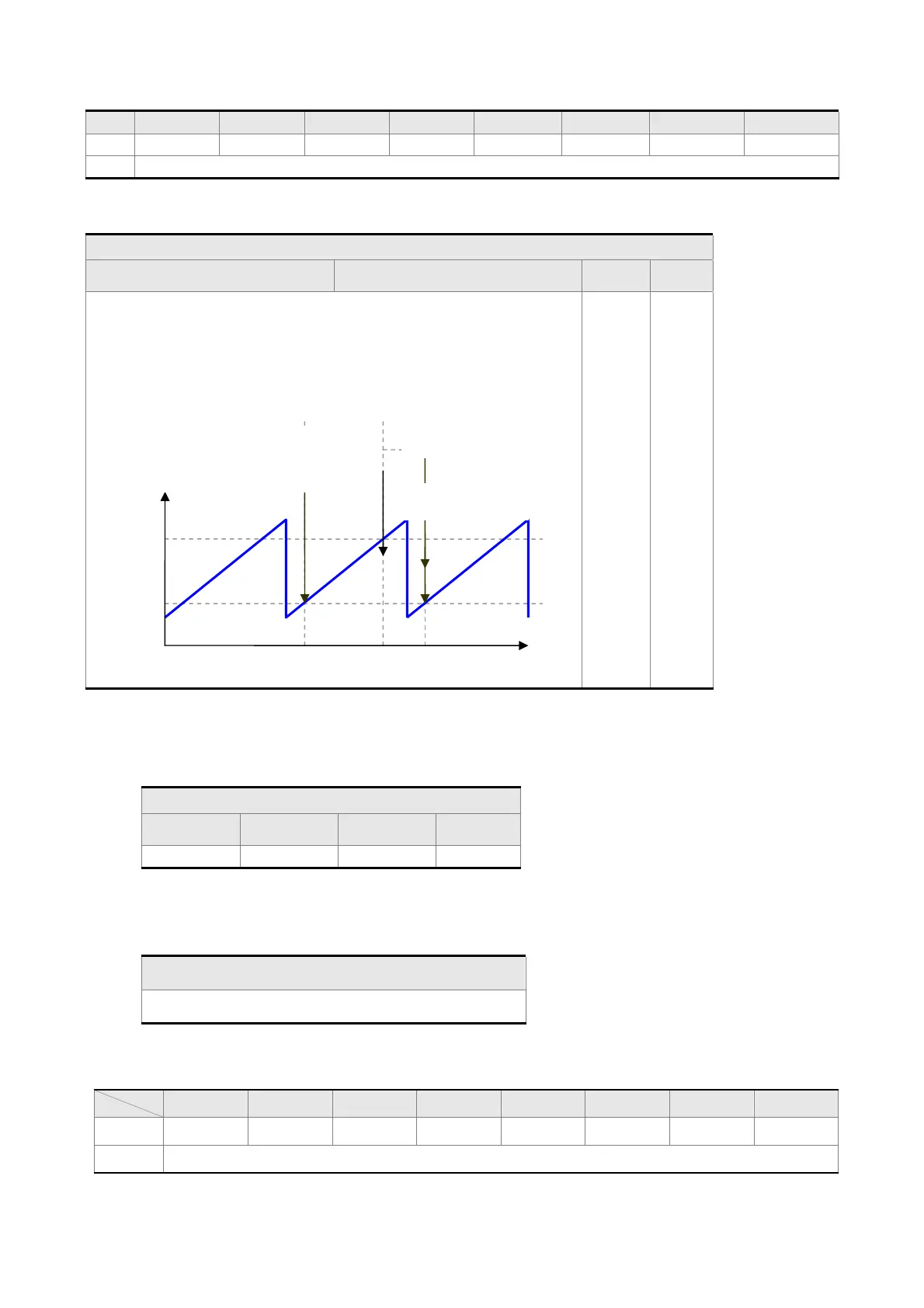
10) Special code: TYPE = 0xA, Indexing command
31 ~ 28 27 ~ 24 23 ~ 20 19 ~ 16 15 ~ 12 11 ~ 8 7 ~ 4 3 ~ 0 BIT
DW0 - OPT2 DLY SPD DEC ACC OPT 0xA
DW1 DATA (32 bit): indexing coordinates command; Unit: PUU
OPT
:
OPT selection
7 6 5 4 BIT
DIR
00: Always onward (Forward)
01: Always towards the back (Reverse)
10: Shortest distance (judge by current and target
position)
11: Reserved
OVLP INS
INS: When this PR is executing, it interrupts the previous one.
OVLP: It is allowed to overlap the next PR. When overlapping, please set DLY to 0.
OPT2
:
OPT2 Selection
27 26 25 24 BIT
- AUTO - S_LOW
AUTO: Position reached and the next PR is loaded automatically.
S_LOW: Selection of speed unit. 0 means the unit is 0.1r/min; while 1 means
0.01r/min
DATA (DW1) Data format:
DW1:DATA (32 bits)
PUU:0 ~ (P2-52 - 1)
P2-52: Size of indexing coordinate
11) Homing setting: P6-00 ~ P6-01, (64 BIT) one set of PR.
31 ~ 28 27 ~ 24 23 ~ 20 19 ~ 16 15 ~ 12 11 ~ 8 7 ~ 4 3 ~ 0 BIT
DW0 BOOT - DLY - DEC1 ACC PATH BOOT
DW1 ORG_DEF (32 bit)
PATH: 0 ~ 3F, (6 BIT)
Current
position
Current
position
Current
position
一律向後
一律向前
最短距離
分度座標值
Rotary direction
Indexing
coordinate
Always towards
the back
Always onward
Shortest
distance
 Loading...
Loading...
