Chapter 8 ParametersASDA-A2R Series
Revision December, 2014
8-263
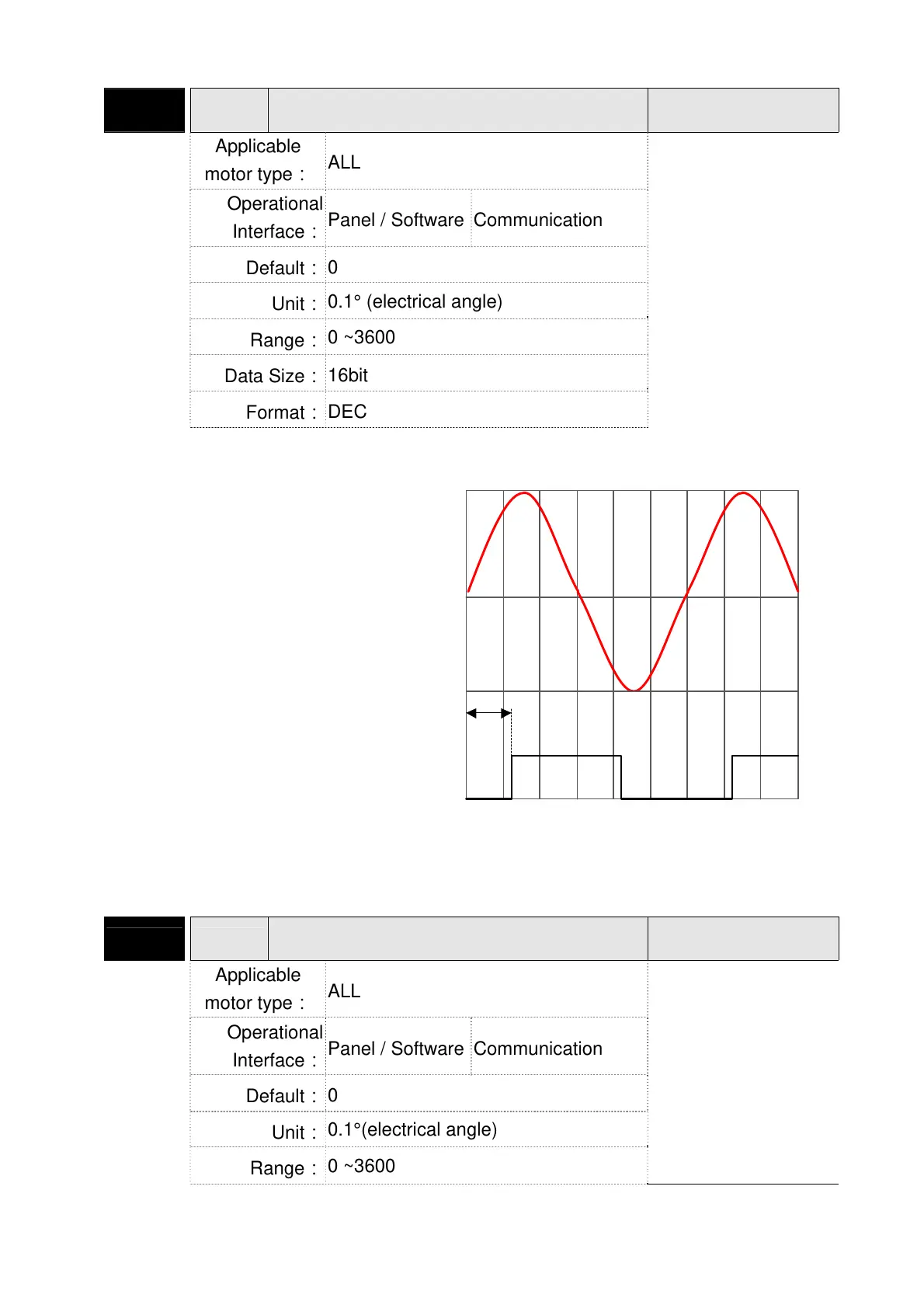
PM-07 Offset Angle of Hall Sensor
Address:
Applicable
motor type:
ALL
Related Section: -
Operational
Interface:
Panel / Software Communication
Default:
0
Unit:
0.1° (electrical angle)
Range:
0 ~3600
Data Size:
16bit
Format:
DEC
Settings:
Motor U phase
back EMF
U phase
U phase of
Hall sensor
PM-07
When hysteresis is caused by different moving direction of
motor, the original point of U phase of Hall sensor will base on
the center angle of hysteresis. (please refer to PM-08 for the
description of hysteresis).
PM-08
Hysteresis Width of Hall Sensor Moving
Back and Forth
Address:
Applicable
motor type:
ALL
Related Section: -
Operational
Interface:
Panel / Software Communication
Default:
0
Unit:
0.1°(electrical angle)
Range:
0 ~3600
 Loading...
Loading...
