Chapter 15 CANopen Overview C2000 Plus
15-25
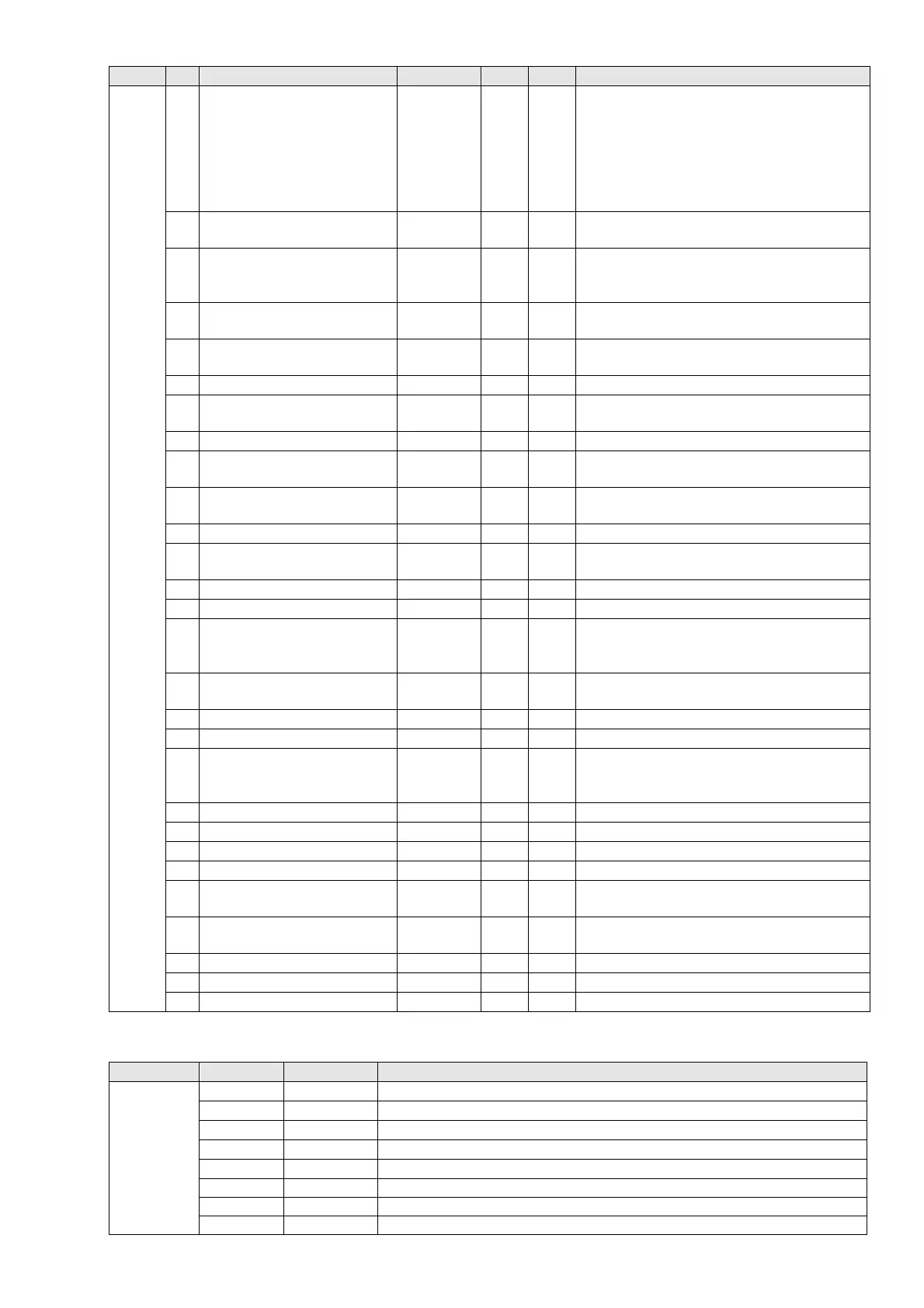
Index Sub Definition Default R/W Size Note
16
Number of actual motor
revolutions (PG1 of PG
card). Starts from 9 when
the actual operation
direction is changed, or the
keypad display at stop is 0.
Max. is 65535
0 R U16
17
Pulse input frequency (PG2
of the PG card)
0 R U16
18
Pulse input position (PG
card PG2), maximum
setting is 65535.
0 R U16
19
Position command tracing
error
0 R U16
1A
Counter value of overload
(0.00–100.00%)
0 R U16
1B
Display GFF in %
0 R U16
1C
Display DC bus voltage
ripples (Unit: V
DC
)
0 R U16
1D
PLC register D1043 data
0 R U16
1E
Magnetic field area of the
synchronous motor
0 R U16
1F
User page displays the
value in physical measure
0 R U16
20
Output Value of Pr.00-05
0 R U16
21
Number of motor turns
when drive operates
0 R U16
22
Operation position of motor
0 R U16
23
Fan speed of the drive
0 R U16
24
Control mode of the drive 0:
speed mode 1: torque
mode
0 R U16
25
Carrier frequency of the
drive
0 R U16
26
Reserved
27
Motor status
28
Output positive/ negative
torque of motor drive
calculation
29
Torque command
2A
kWh display
2B
PG2 pulse input low-word
2C
PG2 pulse input high-word
2D
Motor actual position low-
word
2E
Motor actual position high-
word
2F
PID target value
30
PID offset
31
PID output frequency
CANopen Remote IO Mapping
Index Sub R/W Definition
2026H
01h R Each bit corresponds to the different input terminals
02h R Each bit corresponds to the different input terminals
03h–40h R Reserved
41h RW Each bit corresponds to the different output terminals
42h–60h R Reserved
61h R AVI proportional value (%)
62h R ACI proportional value (%)
63h R AUI proportional value (%)