Chapter 16 PLC Function ApplicationsC2000 Plus
16-149
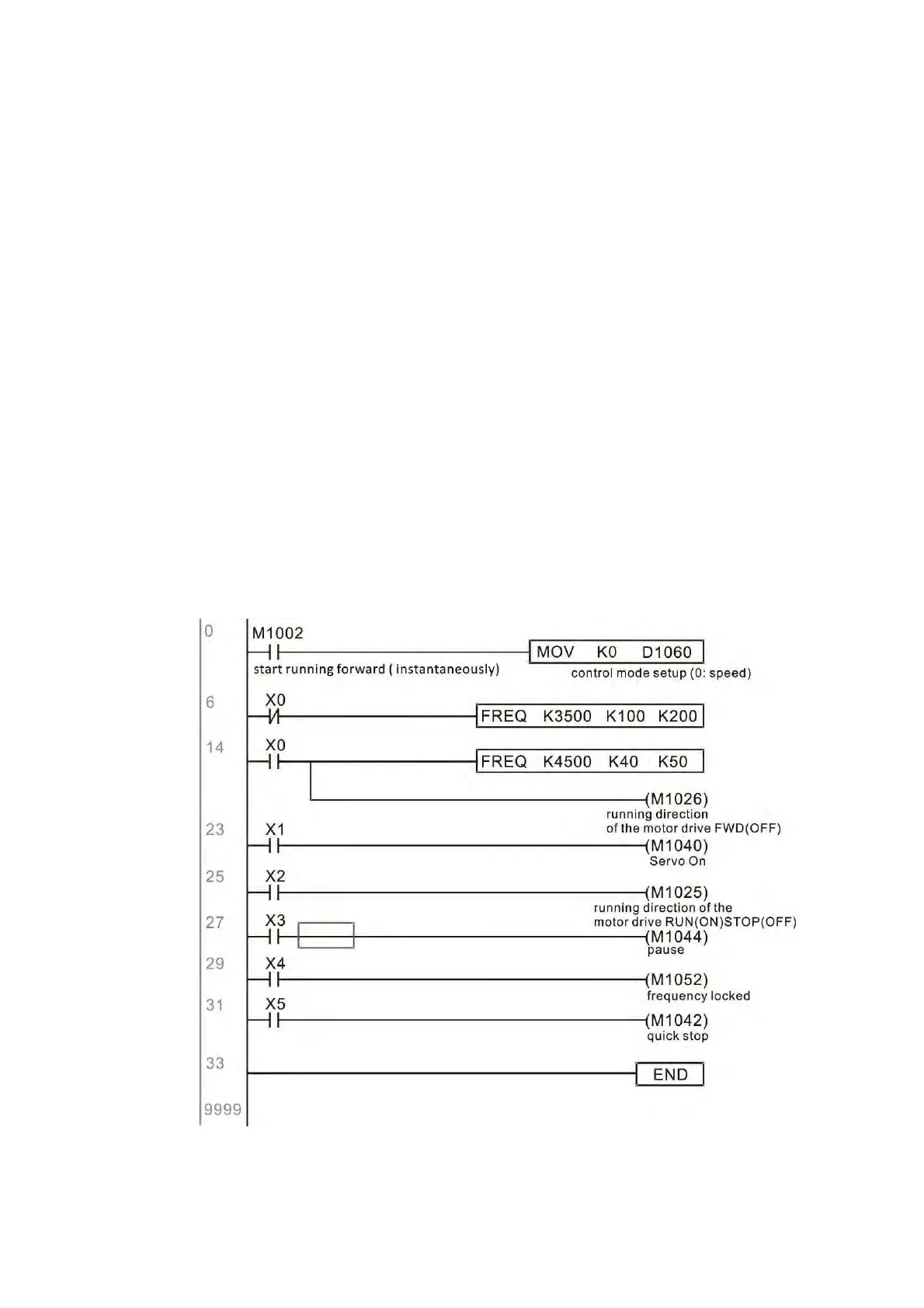
Speed mode control commands:
FREQ(P) S1 S2 S3
Target speed The first acceleration time setting The first deceleration time setting
Example of speed mode control:
Before performing speed control, if the FOC (magnetic field orientation) control method is used, setting
of electromechanical parameters must first be completed.
1. Setting D1060 = 0 will shift the converter to the speed mode (default).
2. Use the FREQ command to control frequency, acceleration time, and deceleration time.
3. Set M1040 = 1, the drive will now be excited, but the frequency will be 0.
4. Set M1025 = 1, the drive frequency command will now jump to the frequency designated
by FREQ, and acceleration/deceleration will be controlled on the basis of the acceleration time
and deceleration time specified by FREQ.
5. M1052 can be used to lock the current operating frequency.
6. M1044 can be used to temporarily pause operation, and the deceleration method will comply
with deceleration settings.
7. M1042 can be used to perform quick stop, and deceleration will be as quick as possible without
giving rise to an error. (There may still be a jump error if the load is too large.)
8. Control user rights: M1040(Servo ON) > M1042(Quick Stop) >M1044(Halt) >M1052(LOCK)