Chapter 16 PLC Function ApplicationsC2000 Plus
16-150
Torque control:
Register table for torque mode:
Control special M
Special M Description of Function
ttributes
M1040 Servo On
RW
Status special M
Special M Description of Function
ttributes
M1056 Servo On Ready
RO
M1063 Torque attained
RO
Control special D
Special D Description of Function
ttributes
D1060 Operating mode setting (torque mode is 2)
RW
Status special D
Special D Description of Function
ttributes
D1050 Actual operating mode (speed mode is 0)
RO
D1053 Actual torque
RO
Torque mode control commands:
TORQ(P) S1 S2
Target torque (with numbers) Frequency restrictions
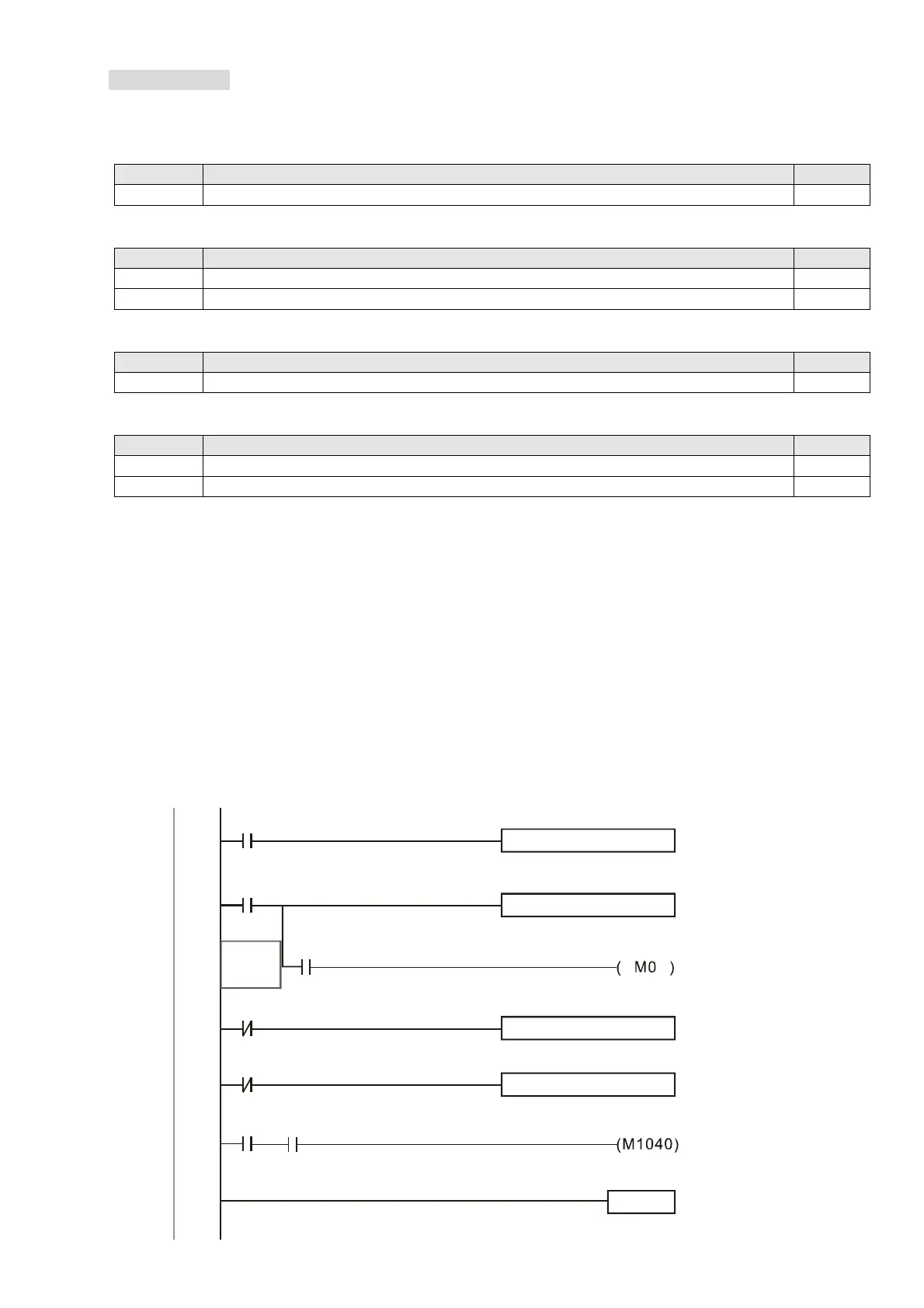
Example of torque mode control:
The setting of electromechanical parameters involved in torque control must be completed before
implementing torque control.
1. Set D1060 = 2 to change the converted to the torque mode.
2. Use the TORQ command to implement torque control and speed limits.
3. Set M1040 = 1; the drive will now be excited, and immediately jump to the target torque or
speed limit. D1053 can be used to find out the current torque.
M1000
M1002
MOV K2
D1060
Set control mode (0:V)
END
ON only for 1scan a
X1
6
0
13
X1
Ready
M0
X4
19
25
28
9999
TMR T0
K30
Power on delay
T0
Normally open contact
Power on delay
TORQ K100
K1000
TORQ K-200
K1000
Power on
Set Torque
Set Torque
Ready