Chapter 12 Descriptions of Parameter SettingsC2000 Plus
12.1-08-11
08-23
PID Control Flag
Default: 0000h
Settings bit0 = 1, PID running in reverse follows the setting for Pr.00-23.
bit0 = 0, PID running in reverse refer to PID’s calculated value.
bit1 = 1, two decimal places for PID Kp
bit1 = 0, one decimal place for PID Kp
bit0 = 1: PID running in reverse function is valid only when Pr.08-21=1.
bit0 = 0, if the PID calculated value is positive, the direction is forward. If the PID calculated
value is negative, the direction is reverse.
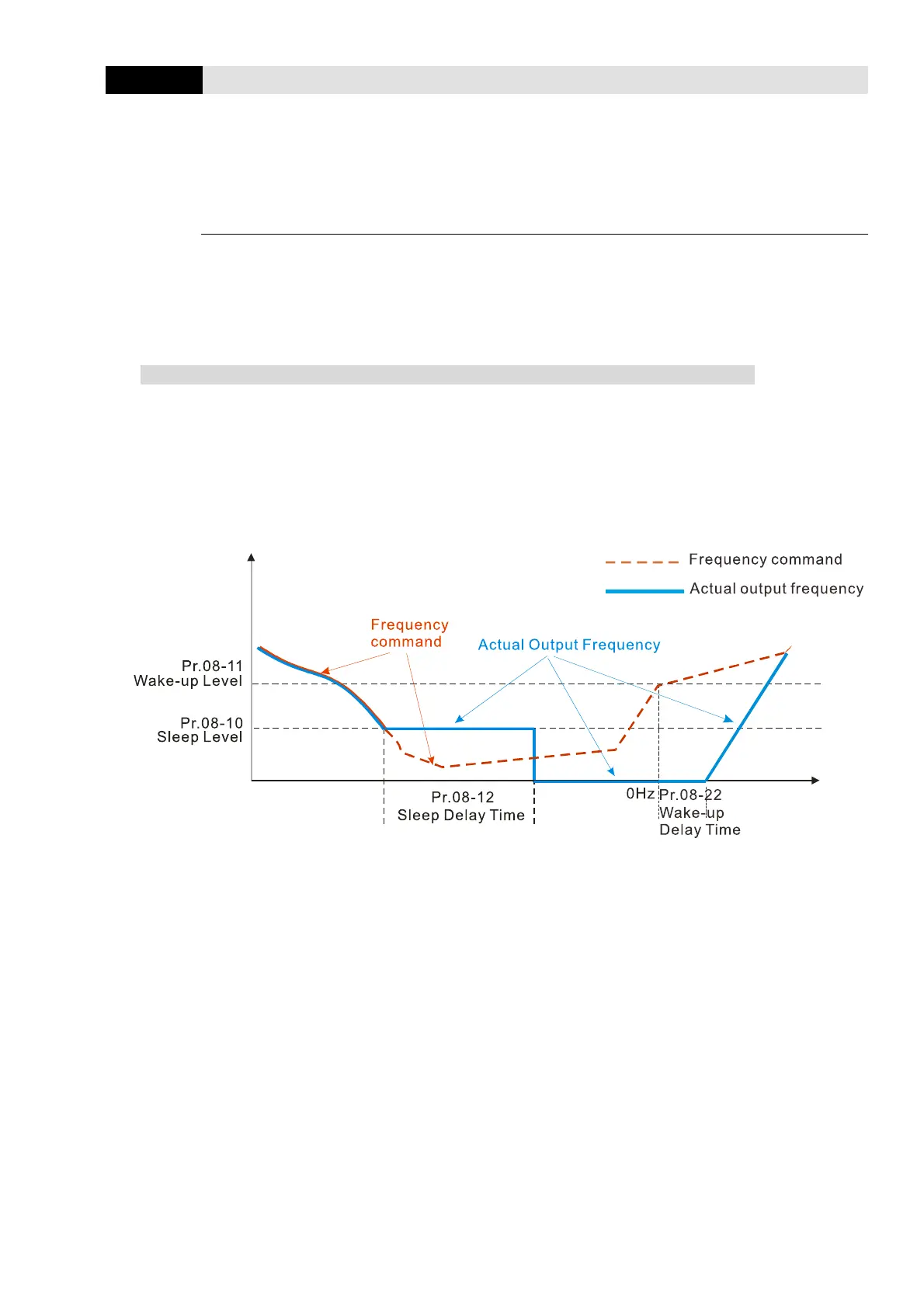
There are three scenarios for the sleep and wake-up frequency. Refer to following explanations:
1) Frequency Command (PID is not in use, Pr.08-00 = 0. Works only in VF mode)
When the output frequency ≤ the sleep frequency, and the drive reaches the preset sleep
time, then the the drive is in sleep mode (0 Hz). When the frequency command reaches the wake-
up frequency, the drive starts to count the wake-up delay time. When the drive reaches the wake-
up delay time, it starts to catch up to reach the frequency command value by the acceleration
time.