5.2 EtherCAT Operation Mode
5.2.1 Velocity Mode
The host controller sends velocity command and acceleration / deceleration data to a motor drive. Then
the motor drive controls the velocity.
Operation Steps are as follows:
1. Set mode: OD 6060h = 02h as velocity mode
2. Set velocity command. OD 6042h (unit: RPM)
3. Set acceleration time OD 604Fh (unit: ms)
4. Set deceleration time OD 6050h (unit: ms)
(1) Set control commands OD 6040h. By following the control word commands listed below to do the
setup, the motor drive operates as mentioned above. Refer to the description of OP 6041h to see
the contents of the state machine.
(2) OD 6040h = 06h, the motor drive goes into < Ready to Switch On > state.
(3) OD 6040h = 0Eh, the motor drive goes into < Switch On > Servo On state.
(4) OD 6040h = 0Fh, the motor drive goes into < Operation Enable > state.
(5) OD 6040h = 7Fh, the motor drive starts running.
Control commands are defined as follows:
Switch On (Enable Servo On ready)
Enable Operation (Enable Servo On)
Runs to the target speed.
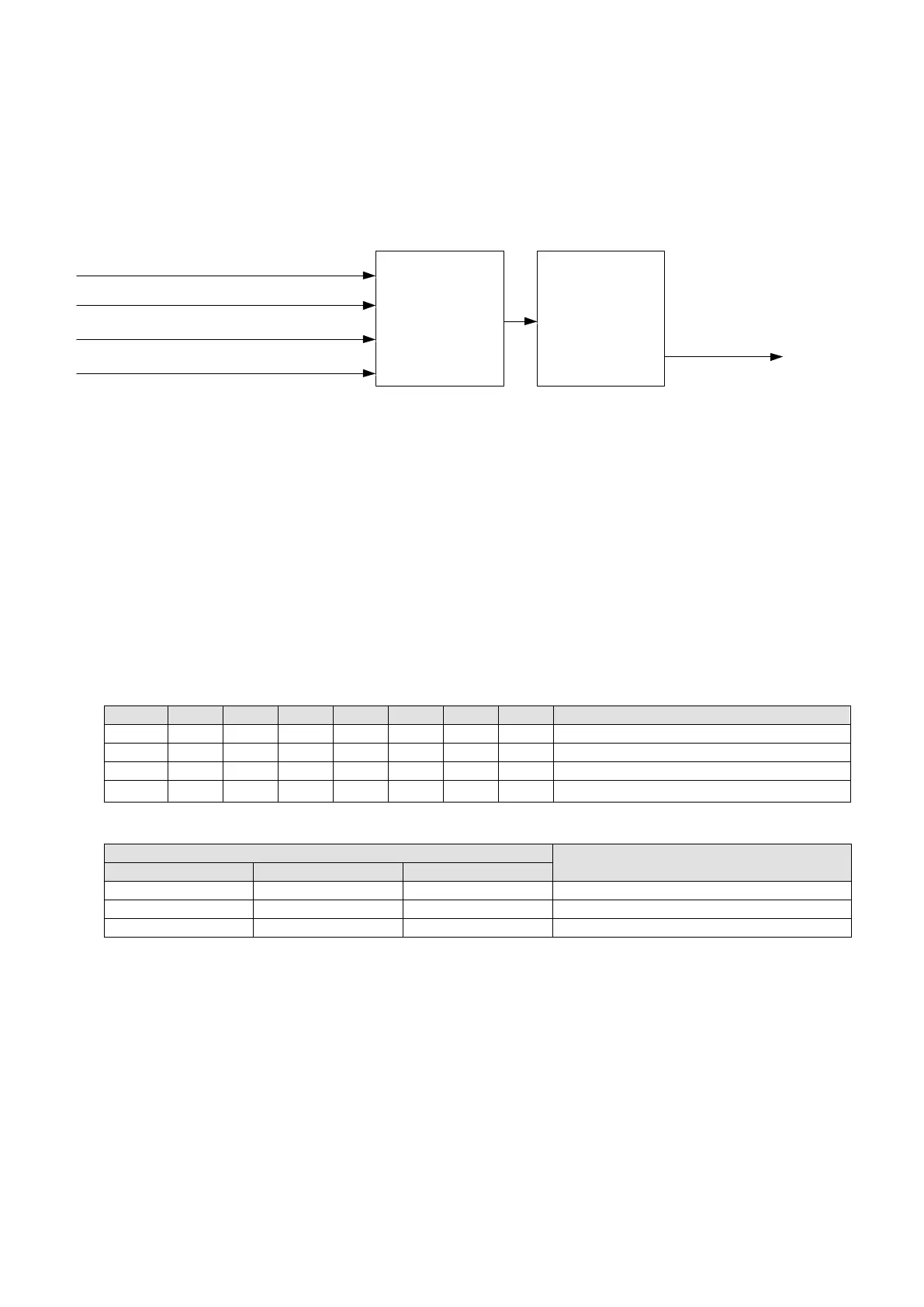
When using the velocity mode (OD 6060h = 02h), the controlword bit (bit 4 ~ bit 6) is defined as follows:
Description
Ramp
Function
vl target velocity (6071
h
)
vl slow down time (6050
h
)
vl ramp function time (604F
h
)
Velocity
Control
Function
vl quick stop time (6051
h
)
vl velocity
actual
value
(6071
h
)
Send Quote Requests to info@automatedpt.com
Call +1(800)985-6929 To Order or Order Online At Deltaacdrives.com
Send Quote Requests to info@automatedpt.com
Call +1(800)985-6929 To Order or Order Online At Deltaacdrives.com