Chapter 12 Description of Parameter SettingsCP2000
12.1-02-6
Settings Functions Descriptions
23 Input the counter value
ON: the counter value increases by 1. Use the function with
Pr.02-19.
24
FWD JOG command
This function is valid when the source of the operation command is
external terminal. ON: the drive executes forward JOG.
25
REV JOG command
This function is valid when the source of the operation command is
external terminal. ON: the drive executes reverse JOG.
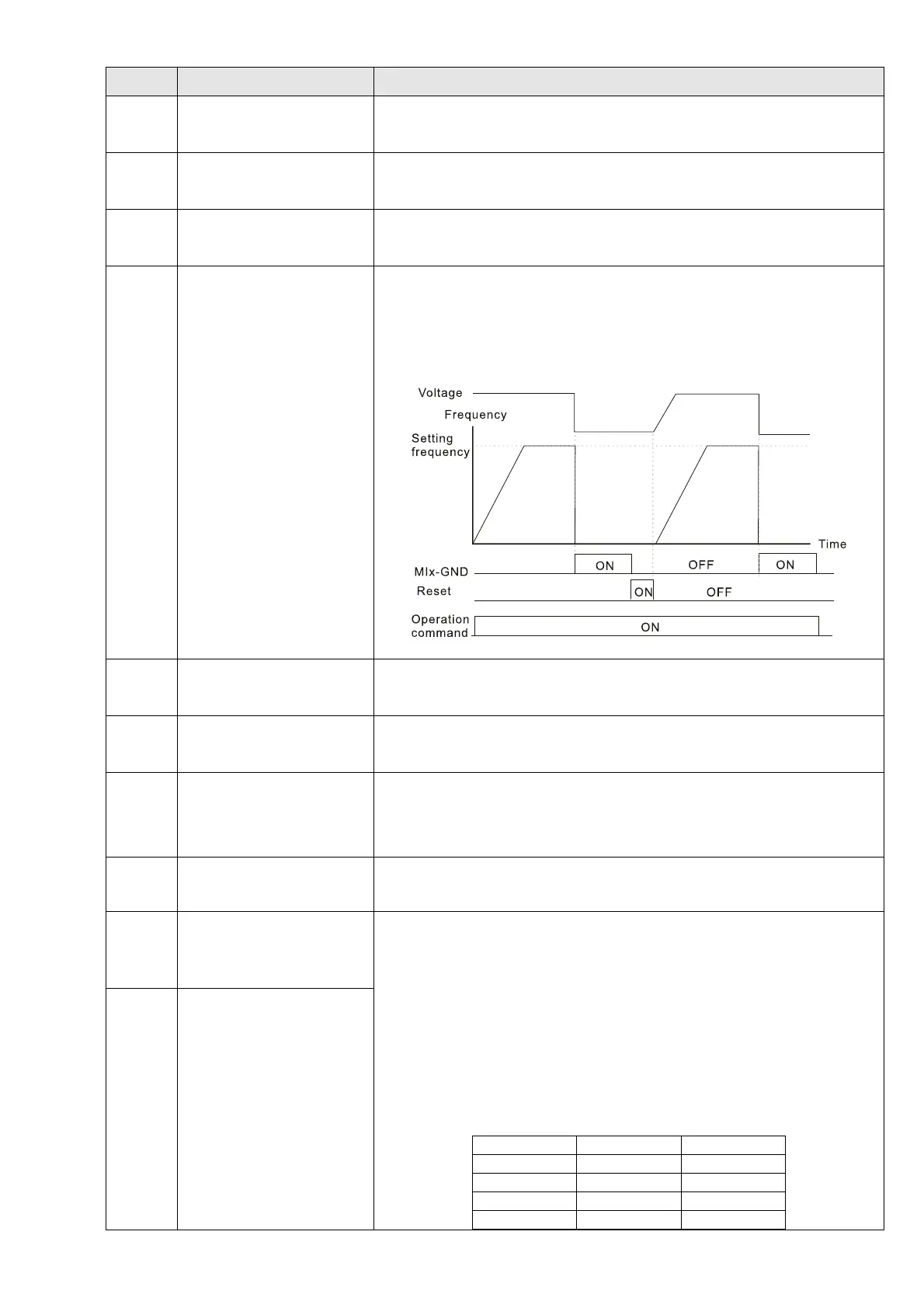
28 Emergency stop (EF1)
ON: the output of the drive stops immediately, displays EF1 on the
keypad, and the motor is in the free run status. The drive keeps
running until the fault is cleared after you press RESET on the
keypad (EF: External Fault).
29
Signal confirmation for
Y-connection
When the control mode is V/F, ON: the drive operates by the first
V/F.
30
Signal confirmation for
-connection
When the control mode is V/F, ON: the drive operates by the
second V/F.
38
Disable EEPROM write
function (parameters
memory disable)
ON: writing to EEPROM is disabled. Changed parameters are not
saved after power off
40 Force coasting to stop ON: during operation, the drive free runs to stop.
41
HAND switch
1. When the MI terminal switches to OFF, it executes a STOP
command. Therefore, if the MI terminal switches to OFF
during operation, the drive stops.
2. Use the keypad KPC-CC01 to switch between HAND and
AUTO. The drive stops first, and then switches to HAND or
AUTO status.
3. The digital keypad KPC-CC01 displays the current status of
the drive (HAND/OFF/AUTO).
bit1 bit0
OFF 0 0
AUTO 0 1
HAND 1 0
OFF 1 1
42 AUTO switch

 Loading...
Loading...


