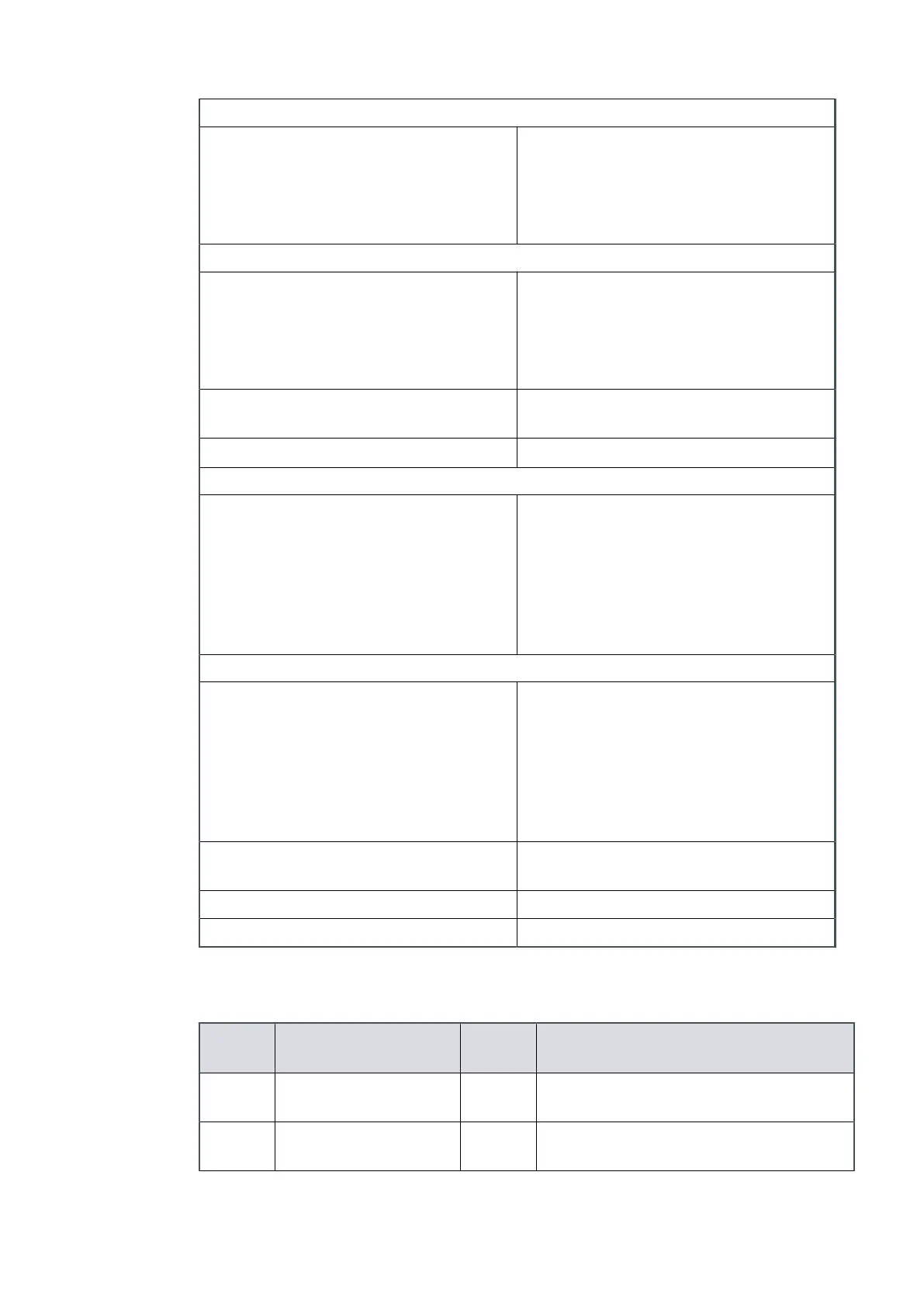
Standby control input:
▪ Enable control voltage: low (closed)
▪ Disable control voltage: high (open)
▪ 0 to 0.8 V d.c. (l
OUT
= 0.3 mA
nominal)
▪ 4 to 26.4 V d.c. (internal pull-up to a
The
venin equivalent circuit: 2.5 V and
10.3 kOhms nominal)
Analogue and RS485 enable control inputs:
▪ Enable control voltage: low (closed)
▪ Disable control voltage: high (open)
▪ 0 to 0.8 V d.c. (l
OUT
= 0.55 mA
nominal)
▪ 4 to 26.4 V d.c. (internal pull-up to a
Thevenin equivalent circuit: 5.5 V and
11.4 kOhms nominal)
Analogue speed input 0 to 10 V d.c. directly proporonal to the
motor speed e.g. 0 V = 0 Hz, 10 V = 250 Hz
Voltage accuracy ± 5% full scale
NORMAL status output:
▪ Type
▪ < Normal speed (default 80%)
▪ >Normal speed
▪ Maximum current r
ang
▪ Maximum voltage rang
▪ Open collector transistor plus pull up
resistor
▪ OFF (4.7 k pull up + diode to 12 V
d.c.)
▪ ON (< 0.8 V d.c. sinking 10 mA)
▪ 10 mA
▪ 28.8 V d.c
FAIL status output:
▪ Type
▪ Fail
▪ OK
▪ Maximum current r
ang
▪ Maximum voltage r
ang
▪ Open collector transistor plus pull up
resistor
▪ OFF (4.7 k pull up + diode to 12 V
d.c.)
▪ ON (< 0.8 V d.c. sinking 10 mA)
▪ 10 mA
▪ 28.8 V d.c.
Analogue 10 V reference + 10 V d.c. analogue voltage reference
unipolar output with diode pr
otecon
Voltage accuracy output ± 2% full scale
Current
£ 5 mA f
or specied accuracy
* Mang half of connector not supplied
Table 14
Logic interface pins
Pin
number
Signal Polarity Use
1 Analogue speed enable-
control input
- Connect to pin 2 (0 V) to enable analogue
speed control via pin 9.
2 0 V control reference - 0 V reference for all control and status sig-
nals listed within this table.
05/2021 - ©Edwards Limited
Page 30A90301880_C
A90301880_C - Oper
aon
 Loading...
Loading...






