are established by registering the coordinates of the TCP and the tool angle in the flange
coordinates of the manipulator. After that, the TCP is automatically calculated and registered in
the tool file.
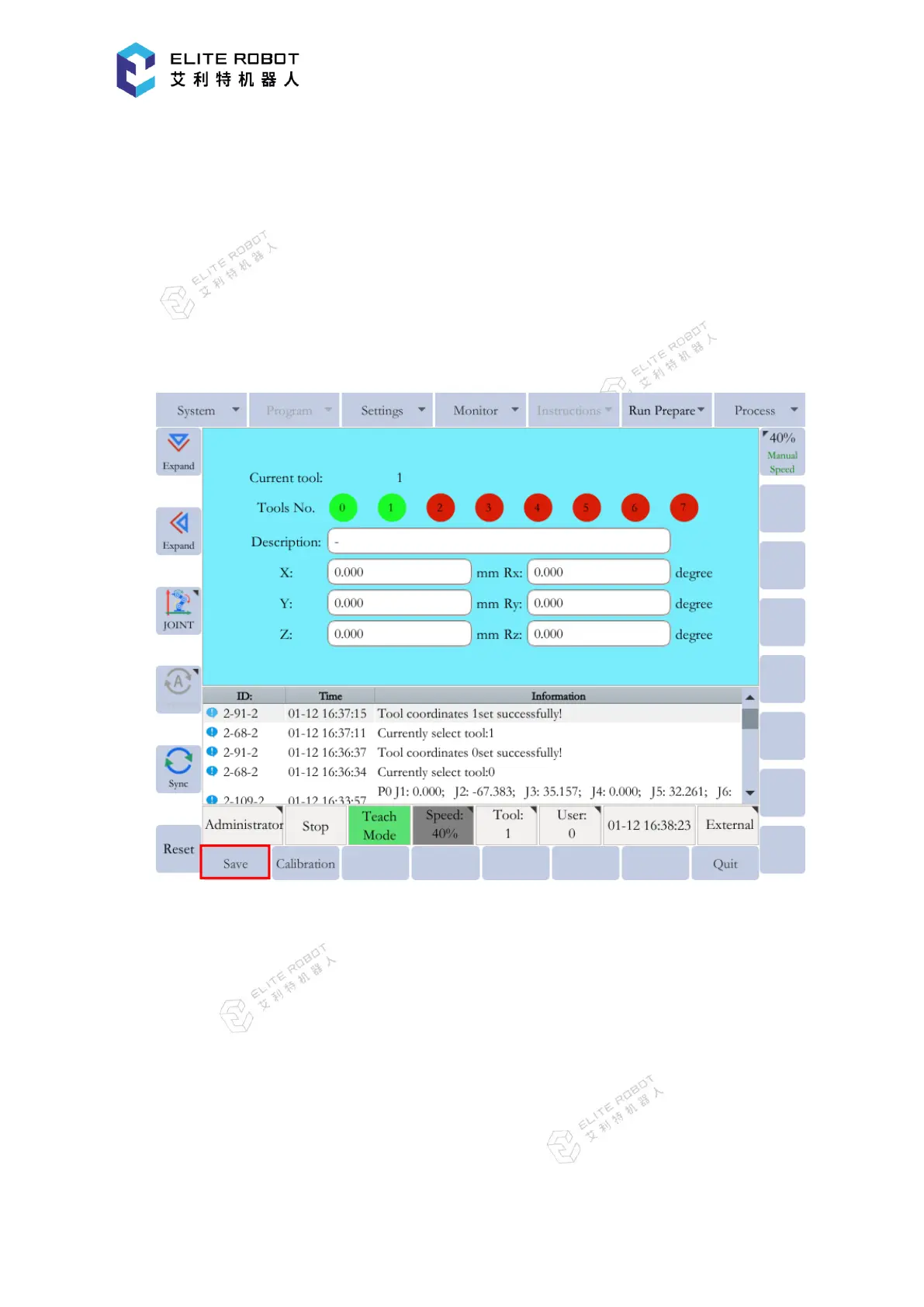
There are 8 tool coordinates numbered from 0 to 7 can be set in the system. Go to the page
of "Readiness for operation - Tool coordinates", and select the tool coordinate number. The TCP
can be calculated by inputting the tool coordinate values (the position of TCP and the tool angle)
in the flange coordinates or performing the seven-point tool calibration.
9.8.1.1 Registering Tool Coordinate Data
When the number input operation is used for registering the tool coordinate, input the TCP
of the tool in the flange coordinates.