Safety
Information
Product
Information
Mechanical
Installation
Electrical
Installation
Getting
Started
Basic
parameters
Running the
Motor
Optimization
SMARTCARD
Operation
Onboard
PLC
Advanced
Parameters
Technical
Data
Diagnostics
UL
Information
146 Quantum MP User Guide
www.emersonct.com Issue: A4
This parameter enables sequencer latching. When sequencer latching is
used, a digital input must be used as a run permit or not stop input. The
digital input should write to Pr 6.39. The run permit or not stop input must
be made active to allow the drive to run. Making the run permit or not
stop input inactive resets the latch and stops the drive.
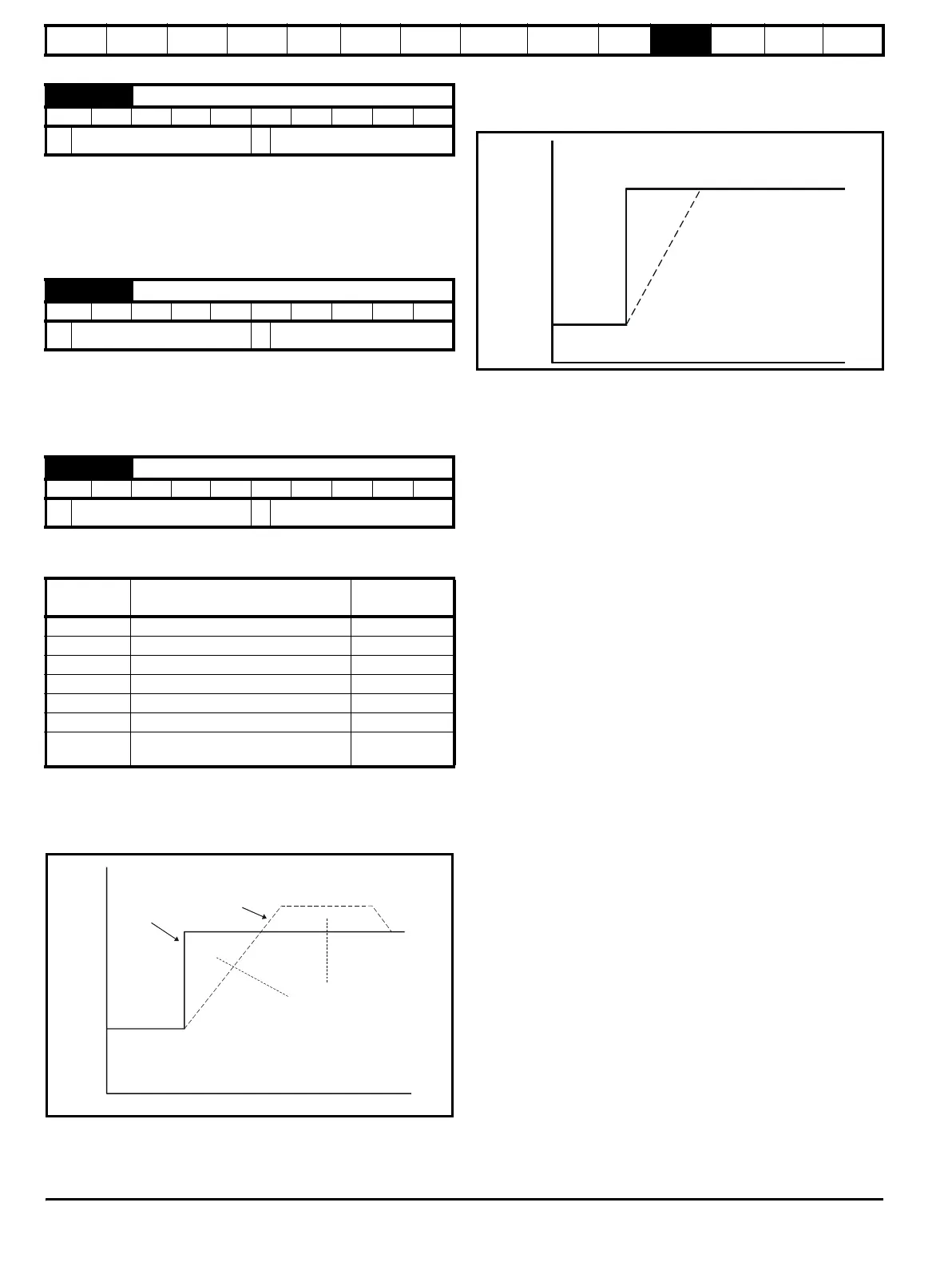
11.23.6 Catch a spinning motor
When the drive is enabled with this parameter at zero, the post ramp
reference (Pr 2.01 (di03, 0.38)) starts at zero and ramps to the required
reference. When the drive is enabled with this parameter at one, the post
ramp reference is set to the motor speed.
11.23.7 Position modes
This parameter is used to set the position controller mode as shown in
the following table.
Rigid position control
In rigid position control the position error is always accumulated. This
means that, if for example, the slave shaft is slowed down due to
excessive load, the target position will eventually be recovered by
running at a higher speed when the load is removed.
Non-rigid position control
In non-rigid position control the position loop is only active when the 'At
Speed' condition is met (see Pr 3.06 in the Mentor MP Advanced User
Guide). This allows slippage to occur while the speed error is high.
Velocity feed forward
The position controller can generate a velocity feed forward value from
the speed of the reference encoder. The feed-forward value is passed to
menu 1, and so ramps may be included if required. Because the position
controller only has a proportional gain, it is necessary to use velocity
feed-forward to prevent a constant position error that would be
proportional to the speed of the reference position.
If for any reason the user wishes to provide the velocity feed forward
from a source other than the reference position, the feed forward system
can be made inactive, i.e. Pr 13.10 = 2 or 4. The external feed forward
can be provided via Menu 1 from any of the frequency/speed references.
However, if the feed forward level is not correct a constant position error
will exist.
Relative jogging
If relative jogging is enabled the feedback position can be made to move
relative to the reference position at the speed defined by Pr 13.17.
Orientation
If Pr 13.10 is 5 the drive orientates the motor following a stop command.
If hold zero speed is enabled (Pr 6.08 = 1) the drive remains in position
control when orientation is complete and holds the orientation position. If
hold zero speed is not enabled the drive is disabled when orientation is
complete.
If Pr 13.10 is 6 the drive orientates the motor following a stop command
and whenever the drive is enabled provided that hold zero speed is
enabled (Pr 6.08 = 1). This ensures that the spindle is always held in the
same position following the drive being enabled.
When orientating from a stop command the drive goes through the fol-
lowing sequence:
1. The motor is decelerated or accelerated to the speed limit pro-
grammed in Pr 13.12, using ramps if these are enabled, in the
direction the motor was previously running.
2. When the ramp output reaches the speed set in Pr 13.12, ramps
are disabled and the motor continues to rotate until the position is
found to be close to the target position (i.e. within 1/32 of a revolu-
tion). At this point the speed demand is set to 0 and the position
loop is closed.
3. When the position is within the window defined by Pr 13.14, the ori-
entation complete indication is given in Pr 13.15.
The stop mode selected by Pr 6.01 has no effect if orientation is
enabled.
6.40 Enable sequencer latching
RW Bit US
OFF (0) or On (1)
ON (1)
6.09 Catch a spinning motor
RW Uni US
0 to 1
1
13.10 Position controller mode
RW Uni US
0 to 6
0
Parameter
value
Mode
Feed forward
active
0
Position controller disabled
1 Rigid position control
2
Rigid position control
3 Non-rigid position control
4
Non-rigid position control
5 Orientation on stop
6
Orientation on stop and when drive
enabled
Speed
t
Reference
Actual
Equal Areas