Liquisys M CPM223/253 Commissioning
Endress+Hauser 57
P(ID) controller
You can define various controller functions for the transmitter. On the basis of the PID
controller, P, PI, PD and PID controllers can be implemented. For an optimum control system,
use the controller that best suits your application. Depending on the option selected in the
R 237/R 266 field, the actuating signal can be output via relays or via current output 2 (if
available).
• P controller
Used for simple linear control purposes with small system deviations. Where major
changes are to be controlled, overshooting may occur. In addition, a lasting control
deviation is to be expected.
• PI controller
Is used for control systems where overshooting is to be avoided and no lasting control
deviation should occur.
• PD controller
Is used for processes that require quick changes and where peaks are to be corrected.
• PID controller
Is used for processes where a P, PI or PD controller does not control sufficiently.
Configuration options of the PID controller
The following configuration options are available for a PID controller:
• Change control gain K
p
(P influence)
• Set integral action time T
n
(I influence)
• Set derivative action time T
v
(D influence)
Basic load dosing (Basic)
The basic load dosing (field R231) is used to set a constant dosage (field R2311)
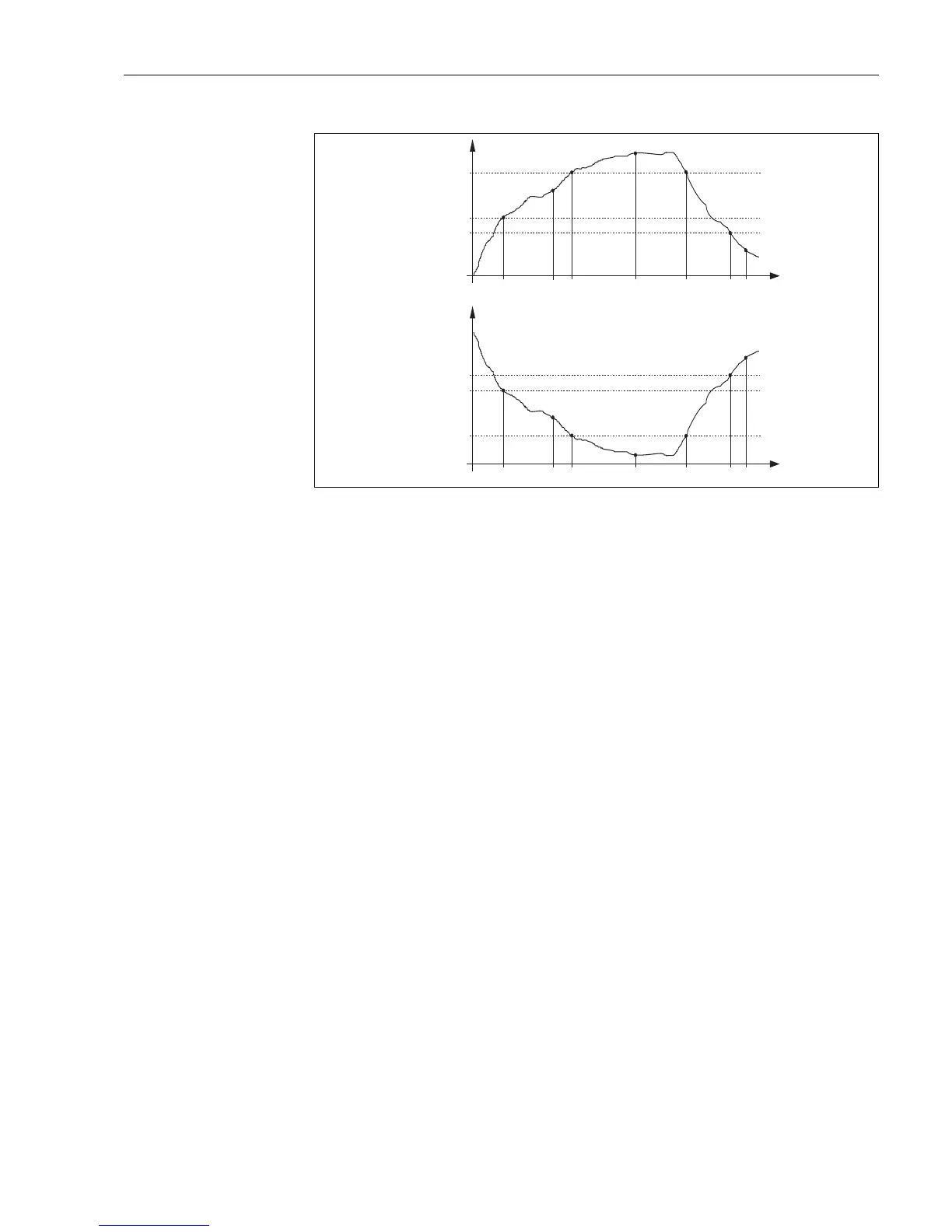
C07-CxM2x3xx-05-06-00-xx-003.eps
Fig. 38: Illustration of the alarm and limit value functions
A
B
Switch-on point > switch-off point: Max. function
Switch-on point < switch-off point: Min. function
1
2
3
4
5
6
7
Alarm threshold
Switch-on point
Switch-off point
Contact ON
Alarm ON
Alarm OFF
Contact OFF

 Loading...
Loading...








