I/O status (hexadecimal)
Each I/O terminal is assigned to one of the 16 binary bits (bit 0 through bit 15). The bit to which no I/O terminal
is assigned is considered to have a value of "0." The I/O status is thus collectively expressed as a hexadecimal
number (0 through F).
In the FRENIC-Lift series, digital input terminals [FWD] and [REV] are assigned to bits 0 and 1, [X1] through [X8]
to bits 2 through 9, and EN terminal to bit 10, respectively. Each bit assumes a value of "1" when the
corresponding signal is ON and a value of "0" when it is OFF
(Note)
. For example, when signals [FWD] and [X1]
are ON while all other signals are OFF, the status is expressed as "0005H."
Digital output terminals [Y1] through [Y4] are assigned to bits 0 through 3. Each is given a value of "1" when it is
short-circuited to [CMY], or a value of "0" when its circuit to [CMY] is open. The status of relay output terminal
[Y5A/C] is assigned to bit 4, which assumes a value of "1" when the contact between [Y5A] and [Y5C] is closed.
The status of relay output terminal [30A/B/C] is assigned to bit 8, which assumes a value of "1" when the contact
between [30A] and [30C] is closed or "0" when the contact between [30B] and [30C] is closed. For example,
when terminal [Y1] is ON, terminals [Y2] to [Y4] are OFF, the contact between [Y5A] and [Y5C] is opened, and
the link between 30A and 30C is closed, then the status is expressed as "0101H."
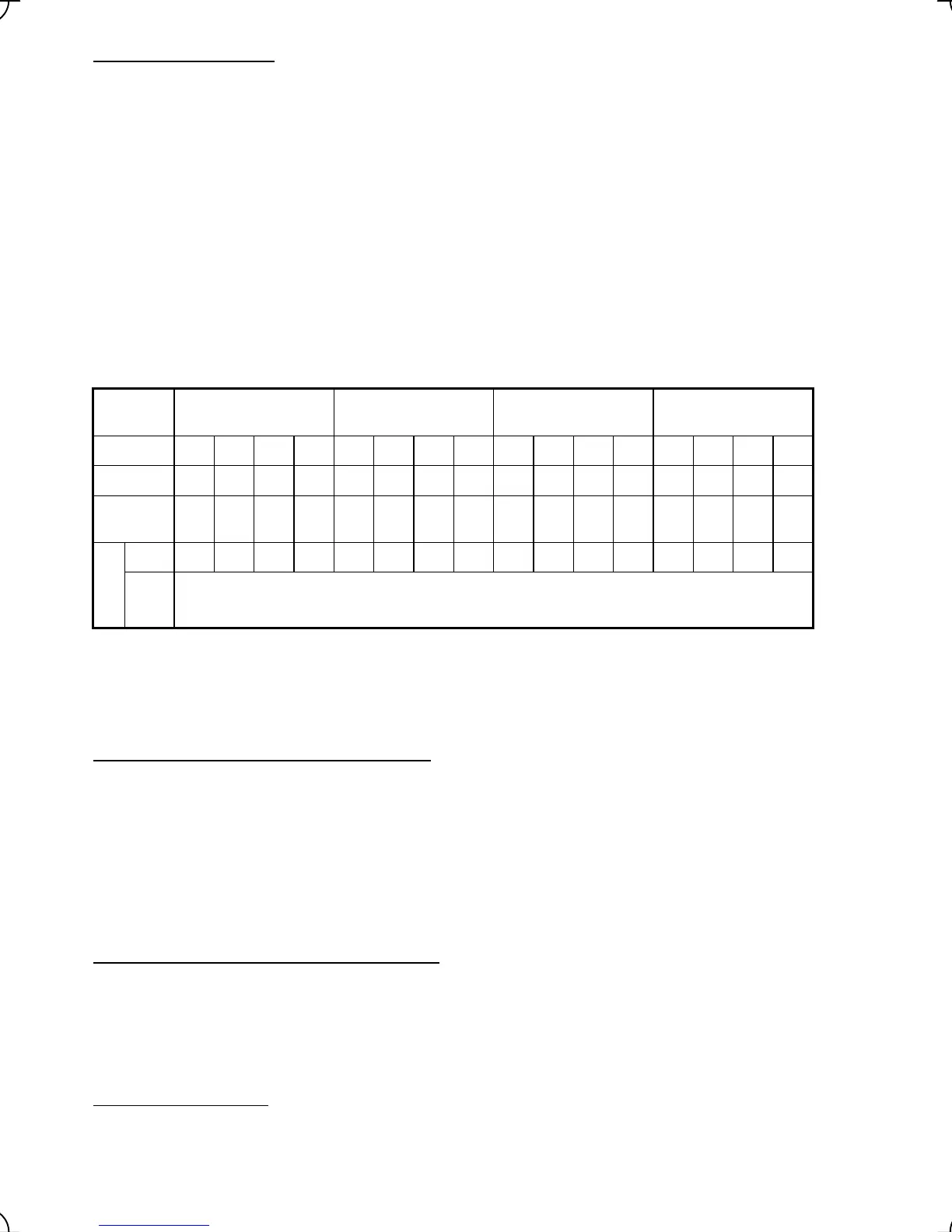
Table 3.9 Hexadecimal Notation
Data
Displayed
Highest digit Lowest digit
Bit 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Input signal
(RST)
*1
*1
(XR) (XF)
*1
- - (EN)
*2
X8 X7 X6 X5 X4 X3 X2 X1 REV FWD
Output signal - - - - - - -
30A/B/
C
- - -
Y5A
/C
Y4 Y3 Y2 Y1
0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 1
Binary
Example
(input)
0005
Hex
H
-: Unassigned
*1 (XF), (XR), (RST) are for communication. Refer to the section given below.
*2 (EN) is for monitoring and cannot be used for input entered via a communications link.
Input status at terminal via communication link
Input commands sent via RS485 or CAN communications can be displayed in two ways: " Input status at
terminal via communication link " or "I/O status (hexadecimal)." The content to be displayed is basically the
same as that for the input signal information at control circuit terminals (hexadecimal) of display; however, (XF),
(XR), and (RST) are added as inputs. Note it is a display of normal logic (Active-ON) (using the original signals
that are not inverted).
Refer to the RS485 Communication User's Manual for details on input commands sent through RS485
communications. For details on CAN communication, refer to the CAN Communication User's Manual.
Magnet pole position detection signals in binary
When the synchronous motor drive option "OPC-LM1-PP" is used, the status of the magnet pole position
detection signal input to the option is displayed in binary, "1" for ON and "0" for OFF. F3, F2 (W), F1 (V) and F0
(U) are assigned from the left in this order. When the input signal is ON, it displays "1," and when the input
signal is OFF, it displays "0."
Encoder pulse frequency
When you set 1 to L01, the frequency of the encoder feedback pulse (Z phase) is displayed.
When ROM
version of a multi-function keypad is 8800, the decimal point is not displayed.
3-19