98 ADV200 • Functions description and parameters list
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
19.4 2262 Flux reg I time ms FLOAT CALCF 0.01 10000.0 ERWS F__
Setting of the integral coefcient of the ux regulator.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
19.5 2264 Flux reg P gain OL A/Wb FLOAT CALCF 0.0 0.0 ERWS __S
Setting of the ux regulator proportional gain when the drive is used in Flux vector OL control mode. This pa-
rameter is set automatically by the self-tuning procedure.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
19.6 2266 Flux reg I time OL ms FLOAT CALCF 0.01 10000.0 ERWS __S
Setting of the ux regulator integral time when the drive is used in Flux vector OL control mode. This parameter
is set automatically by the self-tuning procedure.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
19.7 2270 Voltage reg P gain Wb/V FLOAT CALCF 0.0 0.0 ERWS F_S
Setting of the proportional coefcient of the voltage regulator.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
19.8 2272 Voltage reg I time s FLOAT CALCF 0.1 100.0 ERWS F_S
Setting of the integral coefcient of the voltage regulator.
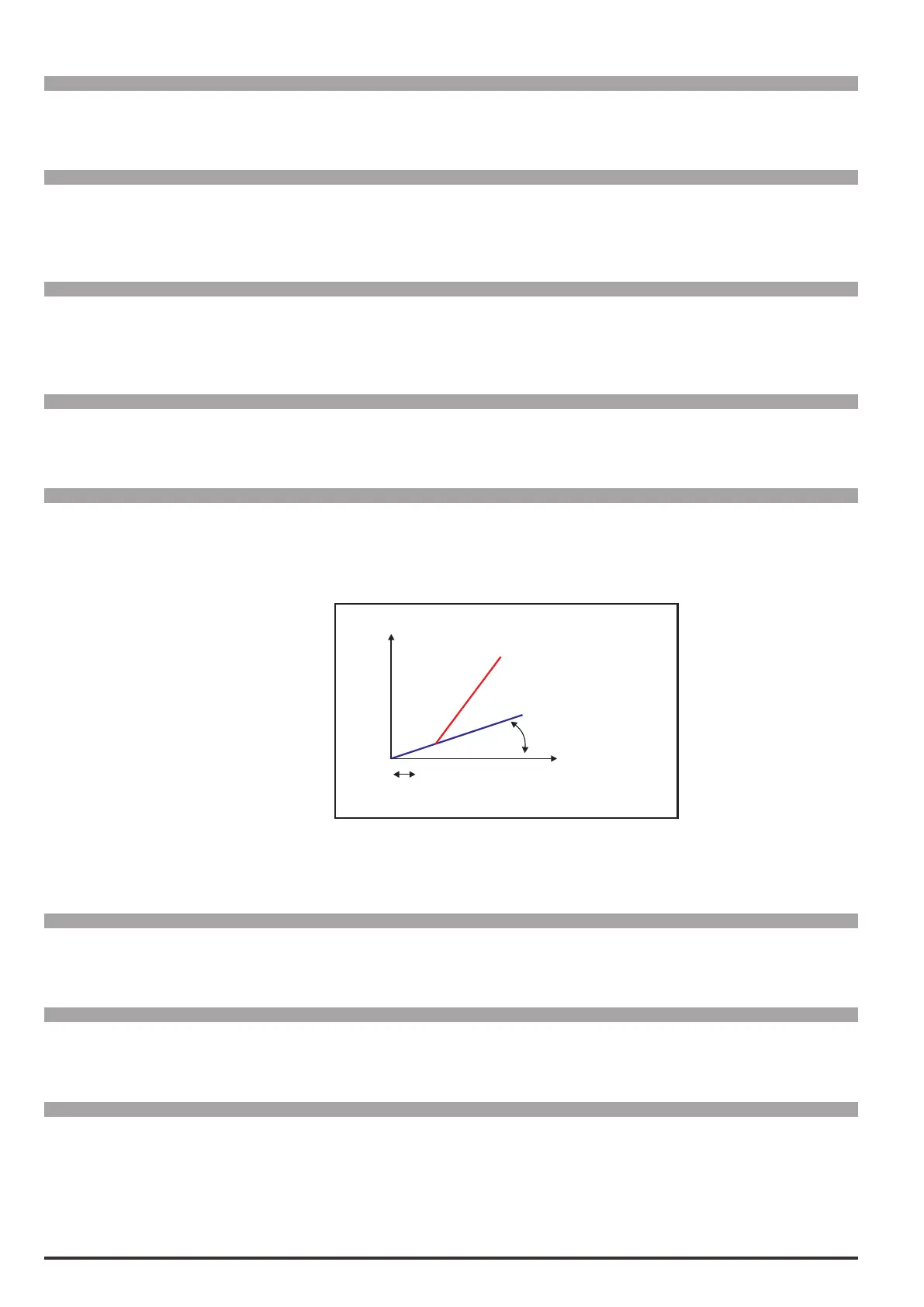
Dead time limit
Dead time slope
Dead time compensation
Output voltage
Voltage command to PWM
The dead time compensation function (Dead time compensation), compensates the distortion of output volt-
age caused by the voltage drop on the IGBT devices and their switching characteristics.
Distortion of output voltage could cause irregular motor rotation.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
19.9 2280 Dead time limit V FLOAT SIZE 0.0 50.0 ERWS FVS
Setting of the dead time voltage compensation value.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
19.10 2282 Dead time slope V/A FLOAT SIZE 0.0 200.0 ERWS FVS
Setting of the dead time compensation slope value.
Menu PAR Description UM Type FB BIT Def Min Max Acc Mod
19.11 2290 Voltage base V FLOAT CALCF 50.0 690.0 ERWS F_S
Setting of the voltage value that determines the threshold at which ux weakening starts (maximum drive out-
put voltage). If this parameter is set to a value equal to the nominal speed of the motor, operation is at nominal
ux in the constant torque region and weakened ux at higher frequencies. The default value is set to the volt-
age supply value.