Interface description
TIM40 A02590_04_E00_00 HBM: public 39
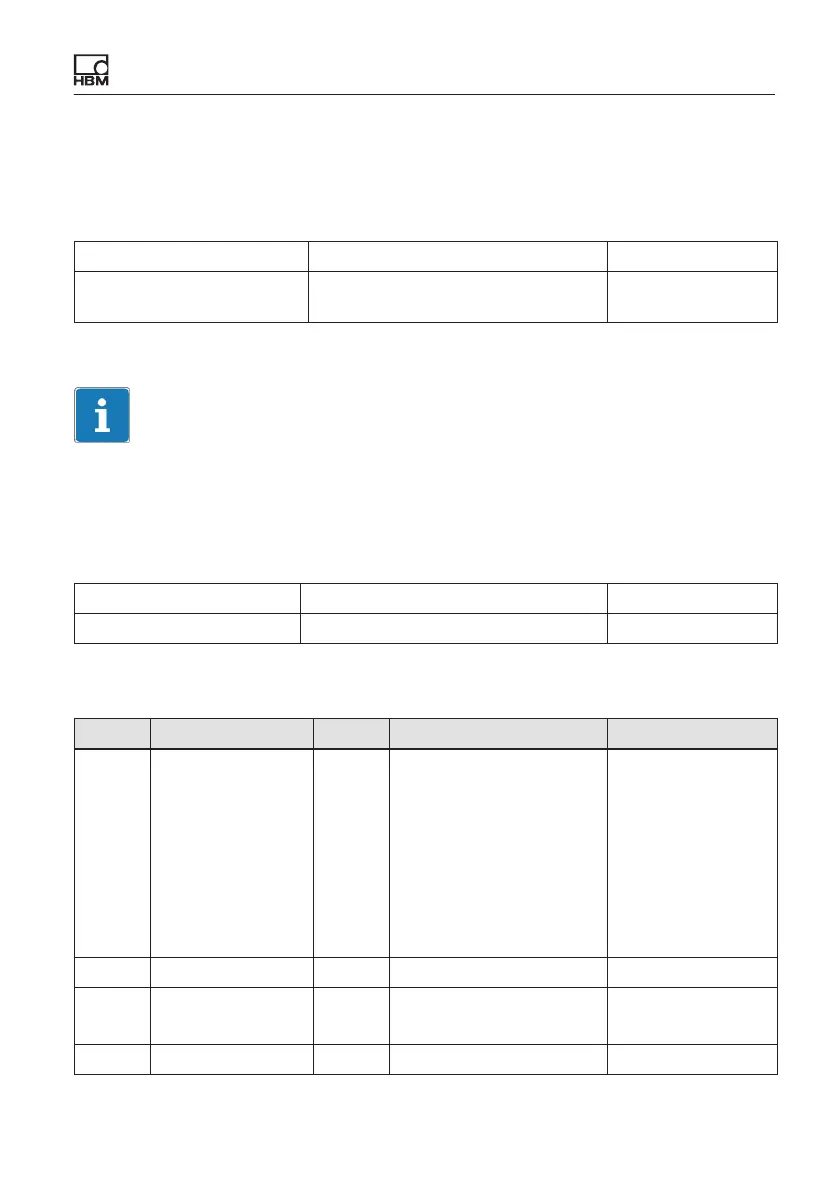
13.1.4 PDO contents
TPDO1 Torque measured value
CAN Identifier (COB ID) 384 (180h) + CAN address Data
1..4. data byte Measured value (LSB‐MSB),
integer32
Torque
TP1/TP2
2)
2)
The required data are selected in the Web Interface (Signal PDO1)
Information
TPDO1 packets are only transmitted from the TIM40 when the measured value
has changed.
TPDO2 Status
CAN Identifier (COB ID) 640 (280h) + CAN address Data
1..2. data byte Status Status
Status
Byte Meaning Bit Values Meaning
1 Status byte
(The value of the
control byte can
be read back
here. The Bits
are updated
after the function
has been
implemented)
0 0 = no function
1 = zeroing of actual
measured value
Torque zeroing
1 0 Reserved
2 0 = Shunt off
1 = Shunt on
Shunt calibration
status
3..5 0 Reserved