Interface description
38 A02590_04_E00_00 HBM: public TIM40
13.1.2 LED status display
For better visibility, the module LEDs ”RUN” and ”ERROR” are coupled with
the enclosure LEDs H1 and H2.
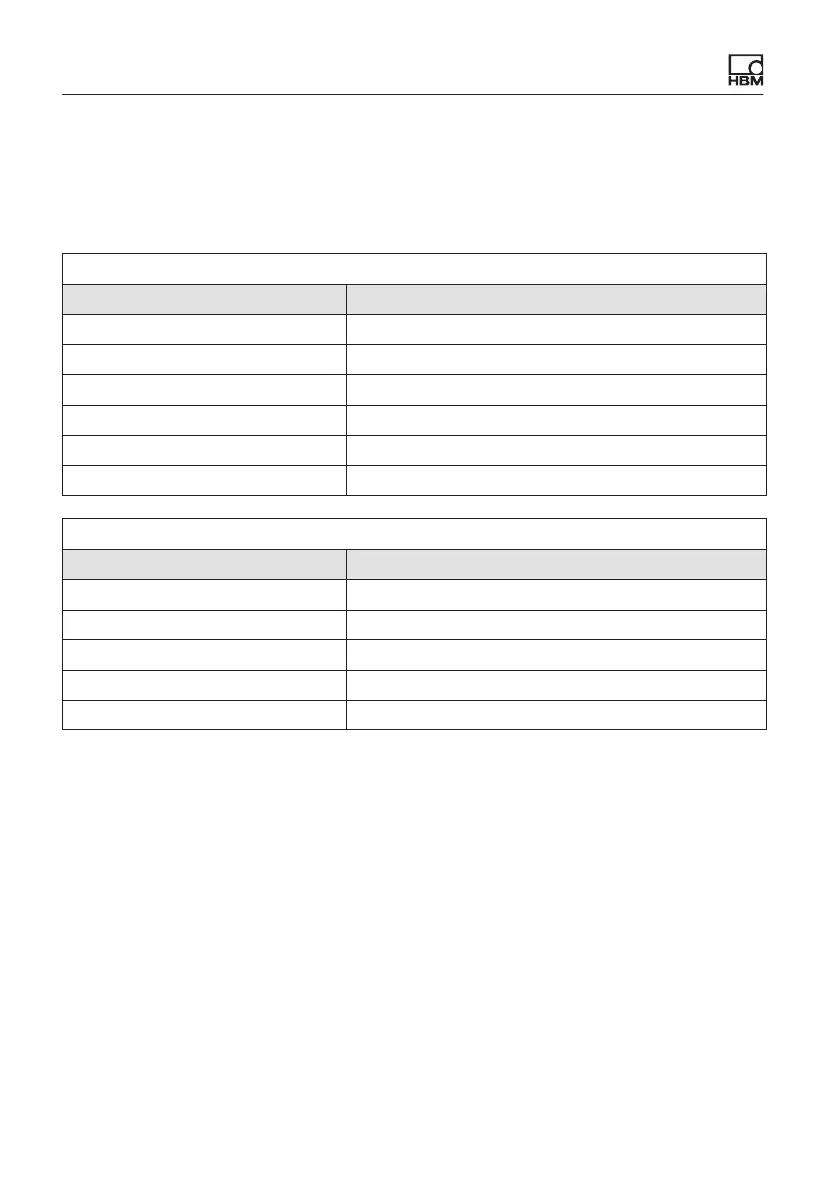
LED RUN/H1
Color/status Meaning
Off No voltage supply
Green Status ”Operational”
Green flashing continuously Status ”Pre‐operational”
Green flashing 1x Status ”Stopped”
Green flickering Baud rate detection on
Red
1)
Status ”EXCEPTION”
LED ERROR/H2
Color/status Meaning
Off No voltage supply or device working
Red flashing 1x Warning limit reached
Red flickering LSS
Red flashing 2x Error control event
Red
1)
Bus off (fatal event)
1)
If both LEDs are red, this indicates a serious error, the bus interfaces are physically switched to
passive.
13.1.3 Cyclic transmission of measured values
The cyclic data are transmitted as so‐called ”Process Data Objects” (PDOs, in
accordance with CANopen definitions). Interesting measured values are trans
mitted cyclically from the measurement module under a previously defined
CAN Identifier, without any further identification. A query message is not
required. A parameter setting determines how often the PDOs are transmitted.
Data formats longer than one byte are always transmitted in LSB–MSB order.