CHAPTER 12: DESCRIPTION OF PARAMETER SETTINGS
149 63-4528—04
10 EF Input (EF: External Fault)
External fault input terminal. It decelerates by Pr.07-19 setting (If there is any
External Fault, it will be saved in an error log)
11 External B.B. Input (Base Block)
When this contact is ON, output of the drive will be cut off immediately, and the motor
will be free run and display B.B. signal. Refer to Pr.07-07 for details.
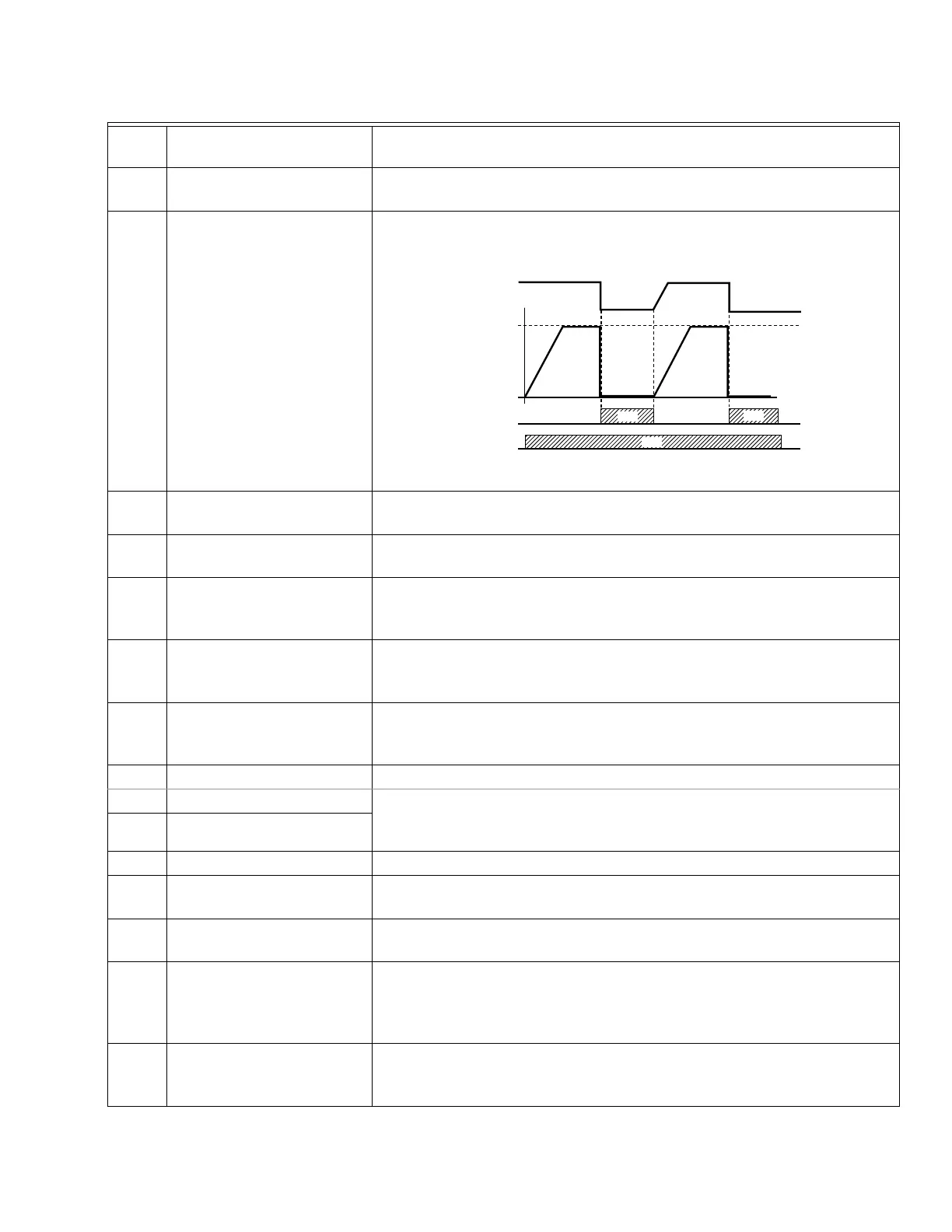
12 Output stop
If this contact is ON, output of the drive will be cut off immediately, and the motor will
then be free run. Once it is turned to OFF, the drive will accelerate to the setting
frequency.
13
Cancel the setting of the optimal
accel./decel. time
Before using this function, Pr.01-36 should be set to mode 01, 02, 03 or 04 first.
When this function is enabled, OFF is for auto mode and ON is for linear accel./decel.
14
Switch between drive settings 1
and 2
When the contact is ON: use parameters of motor 2. When it is OFF: use parameters
of motor 1.
15
Operation speed command form
AVI1
When the contact is ON, the source of the frequency has to be from AVI1. (If the
operation speed commands are set to AVI1, ACI and AVI2 at the same time. The
priority is AVI1, ACI, AVI2)
16
ACI Operation speed command
form ACI
When the contact is ON, the source of the frequency has to be from ACI. (If the
operation speed commands are set to AVI1, ACI and AVI2 at the same time. The
priority is AVI1, ACI, AVI2)
17
Operation speed command form
AVI2 I
When this function is enabled, the source of the frequency has to be from AVI2. (If
the operation speed commands are set to AVI1, ACI and AVI2 at the same time. The
priority is AVI1, ACI, AVI2)
18 Emergency Stop (07-19) When the contact is ON, the drive will ramp to stop by setting of Pr.07-19.
19 Digital Up command When the contact is ON, the frequency of the drive will be increased or decreased by
one unit (Parameter 02-00). If this function is constantly ON, the frequency will be
increased or decreased by setting of Pr.02-09 or Pr.02-10.
20 Digital Down Command
21 PID function disabled When the contact is ON, the PID function is disabled
22 Clear counter
When the contact is ON, it will clear current counter value and display “0”. Only when
this function is disabled, it will keep counting upward.
23
Input the counter value (multi-
function input command 6)
The counter value will increase 1 once the contact is ON. It needs to be used with
Pr.02-17.
24 FWD JOG command
When the contact is ON, the drive will execute forward Jog command. When execute
JOG command under torque mode,
the drive will automatically switch to speed mode; after JOG command is done, the
drive will return to torque mode.
25 REV JOG command
When the contact is ON the drive will execute reverse Jog command. When execute
JOG command under torque mode, the drive will automatically switch to speed
mode; after JOG command is done, the drive will return to torque mode.
Table 1. Table of Functions (Continued)
M33639
TIME
OFF
MI X-GND
OPERATION
COMMAND
SETTING
FREQUENCY
FREQUENCY
VOLTAGE
ON ON
ON
 Loading...
Loading...