3. Operation
Fieldbus Communication
93
RCP6
14) Stop mode ········· Automatic servo OFF is enabled after a certain period from the
completion of positioning for power saving.
Time setting is to be conducted in Parameter No. 36 to 38 Automatic
Servo-off Delay Time 1 to 3, and three types of time are available to
select.
Selection is available from 0 to 3 for the RCP6S, RCM-P6AC and
RCM-P6DC.
Selection is available from 0 to 7 for RCM-P6PC. However, selection
should be made from 0 to 3 in case an actuator equipped with the
high-resolution battery-less absolute encoder is connected.
[Refer to 6.1 Automatic Servo-off and Full Servo Functions]
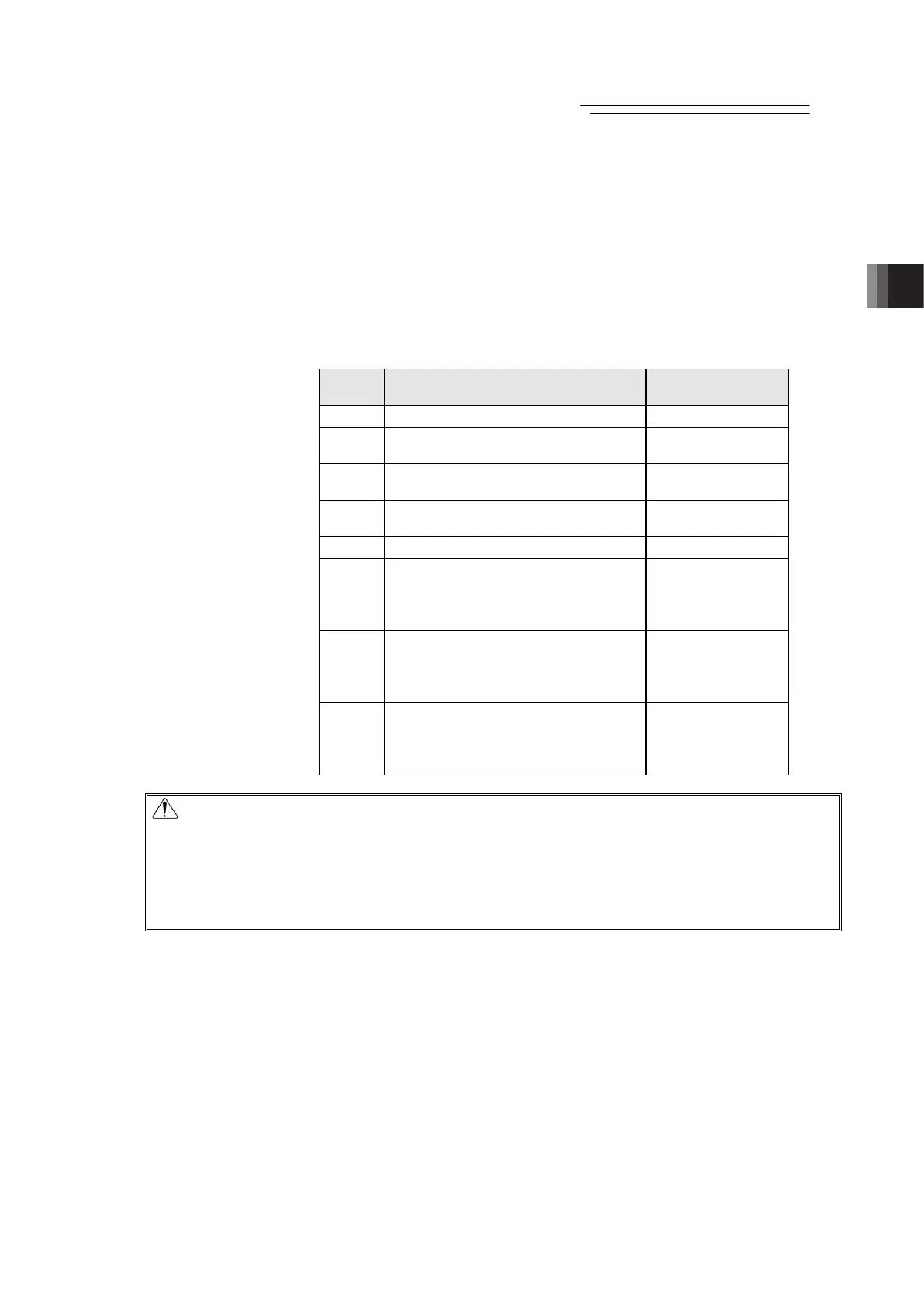
Setting Operation after Positioning
Complete
Selectable Model
0 Keep the servo ON
All mdels
1 Automatic servo-off in a certain time
(Parameter No. 36 set values)
All mdels
2 Automatic servo-off in a certain time
(Parameter No. 37 set values)
All mdels
3 Automatic servo-off in a certain time
(Parameter No. 38 set values)
All mdels
4 Full servo control RCM-P6PC
5
Full-servo control for a certain time
(Parameter No. 36 set values) and
then automatically turning servo
OFF
RCM-P6PC
6
Full-servo control for a certain time
(Parameter No. 37 set values) and
then automatically turning servo
OFF
RCM-P6PC
7
Full-servo control for a certain time
(Parameter No. 38 set values) and
then automatically turning servo
OFF
RCM-P6PC
Caution:
y
No retaining torque is provided in automatic servo OFF. Pay sufficient attention to
the setting because the actuator may be moved by external force applied to it.
y
Do not use the automatic servo OFF if the next moving command is relative distance
specification (pitch feed). Failure to follow it may cause position shift to occur.
y
Do not use the automatic servo OFF in pressing. If used, the pressing force is lost.
y
Automatic Servo OFF would not function in the operation with teaching mode of PC
software.
3.3
 Loading...
Loading...
