3. Operation
Fieldbus Communication
142
RCP6
[16] Push-motion specification (PUSH) PLC Output Signal
Operation
Mode
Positioner 1 Simple Direct Direct numeric
specification
Positioner 2 Positioner 3 Positioner 5
{ : Equipped
×
: Not equipped
× ×
{
× × ×
When the movement command signal is output after this signal is turned ON, the pressing
operation is performed.
When this signal is set to “OFF”, the normal positioning operation is performed.
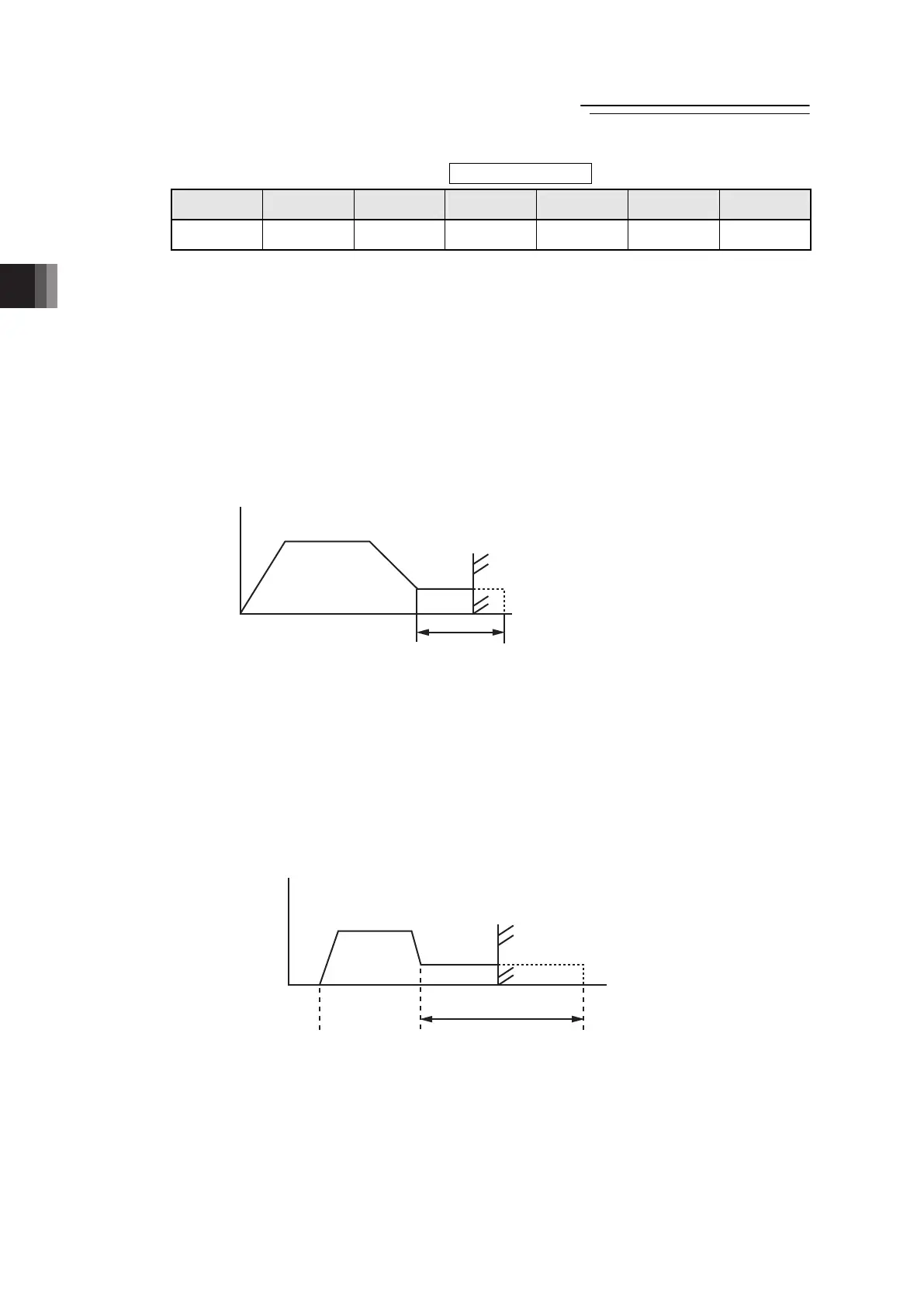
[Pressing Operation CON Method]
After reaching the target position
(Note 1)
from the current position, the actuator moves with the
pressing speed for the distance set as the pressing band width.
The positioning complete signal (PEND) turns ON if the work piece hits and pressing is
judged as completed while in the pressing operation.
Note 1 In Direct Indication Mode, it is the value input in the target position register.
Speed
Movement distance
Target position
Pressing width (Max. pressing level)
Position where the actuator is pushed against
the work and the pressing completion is judged
so the positioning completion signal is turned “ON”
↓
[Pressing Operation SEP Method]
The pressing operation is performed with the start position set at the point in front of the
target position
(Note 1)
for the width of the positioning width (for Direct Indication Mode).
The positioning complete signal (PEND) turns ON if the work piece hits and pressing is
judged as completed while in the pressing operation.
Note 1 In Direct Indication Mode, it is the value input in the target position register.
(Note) Pulling operation cannot be performed.
Current position
↓
Pressing
start position
Speed
Target position
Positioning width
Position where the actuator is pushed against
the work and the pressing completion is judged
so the positioning completion signal is turned “ON”
3.7.1
 Loading...
Loading...
