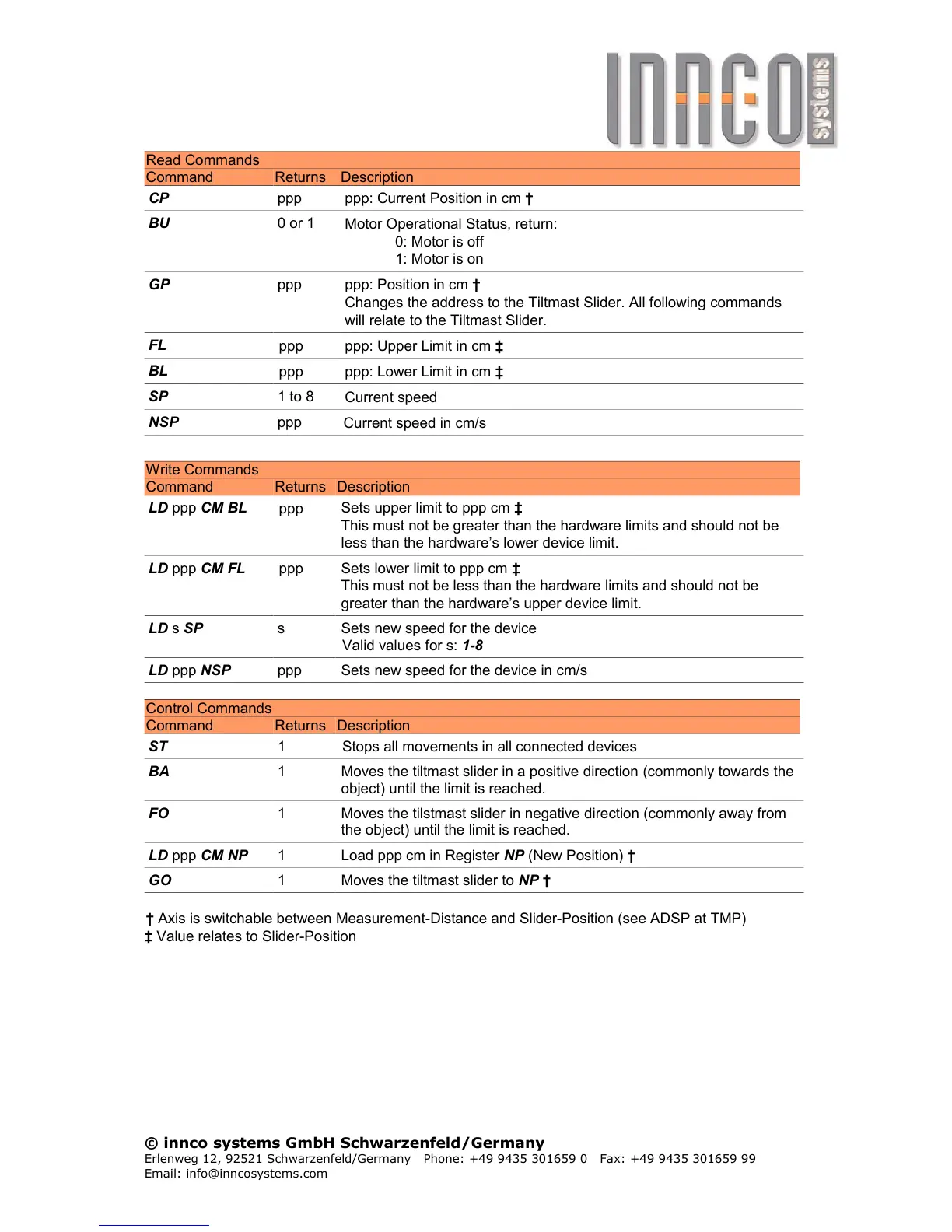
Read Commands
Command Returns Description
CP ppp ppp: Current Position in cm †
BU 0 or 1
Motor Operational Status, return:
0: Motor is off
1: Motor is on
GP ppp
ppp: Position in cm †
Changes the address to the Tiltmast Slider. All following commands
will relate to the Tiltmast Slider.
FL
ppp ppp: Upper Limit in cm ‡
BL
ppp ppp: Lower Limit in cm ‡
SP 1 to 8
Current speed
NSP ppp
Current speed in cm/s
Write Commands
Command Returns Description
LD ppp CM BL
ppp
Sets upper limit to ppp cm ‡
This must not be greater than the hardware limits and should not be
less than the hardware’s lower device limit.
LD ppp CM FL
ppp
Sets lower limit to ppp cm ‡
This must not be less than the hardware limits and should not be
greater than the hardware’s upper device limit.
LD s SP s Sets new speed for the device
Valid values for s: 1-8
LD ppp NSP ppp Sets new speed for the device in cm/s
Control Commands
Command Returns Description
ST 1 Stops all movements in all connected devices
BA 1 Moves the tiltmast slider in a positive direction (commonly towards the
object) until the limit is reached.
FO 1 Moves the tilstmast slider in negative direction (commonly away from
the object) until the limit is reached.
LD ppp CM NP 1 Load ppp cm in Register NP (New Position) †
GO 1 Moves the tiltmast slider to NP †
† Axis is switchable between Measurement-Distance and Slider-Position (see ADSP at TMP)
‡ Value relates to Slider-Position
© innco systems GmbH Schwarzenfeld/Germany
Erlenweg 12, 92521 Schwarzenfeld/Germany Phone: +49 9435 301659 0 Fax: +49 9435 301659 99
Email: info@inncosystems.com