5 System Commissioning
-
169
-
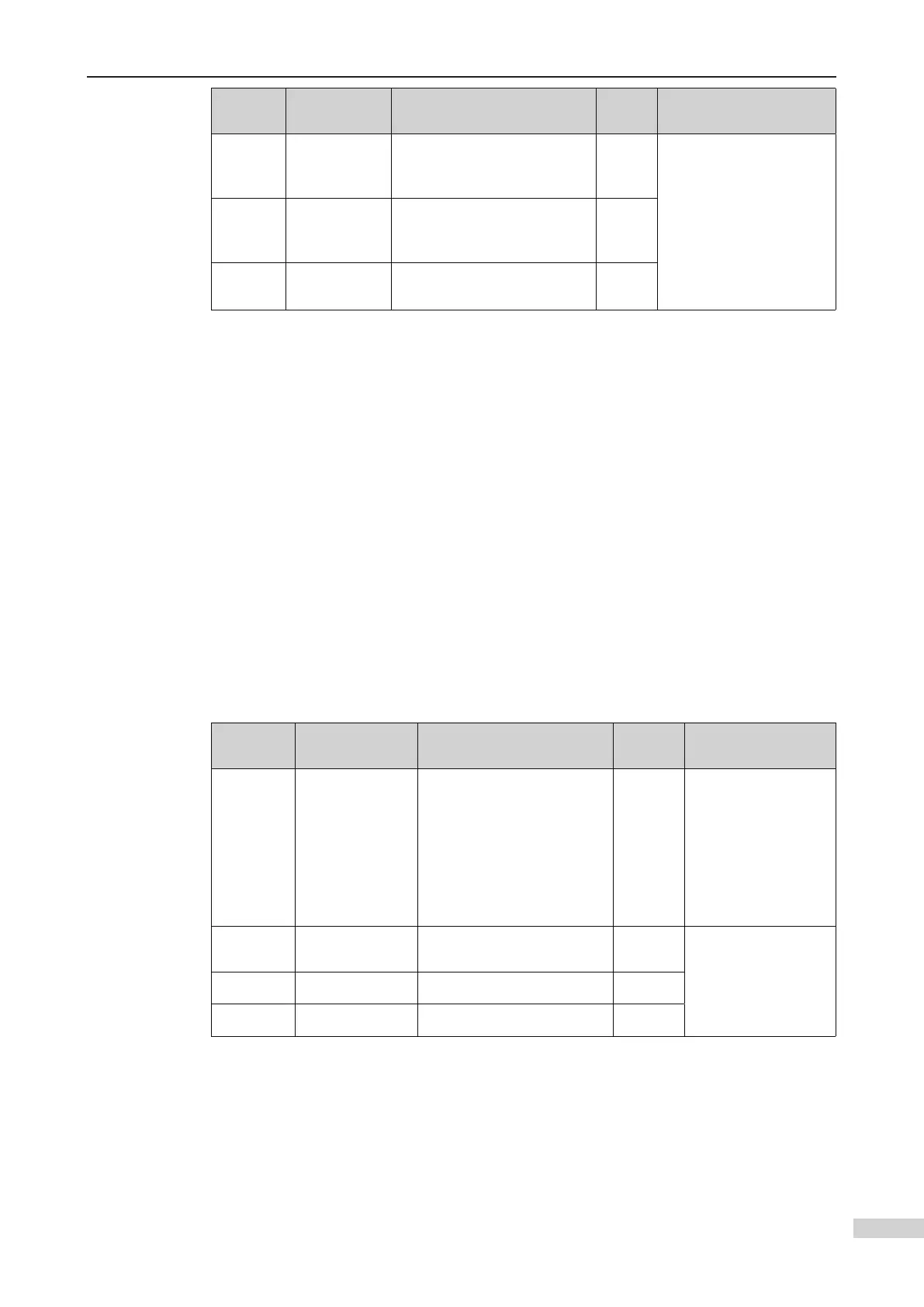
Function
Code
Name Setting Range Default Description
F2-11
Zero servo
current
2.0% to 50.0% 15.0%
These are zero servo
adjustment parameters,
and are valid only when
F8-01 is set to 2 or 3.
F2-12
Zero servo
speed loop
Kp
0.00 to 2.00 0.50
F2-13
Zero servo
speed loop Ti
0.00 to 2.00 0.60
Notes:
When no-load-cell pre-torque compensation is used (F8-01 = 2), no analog load cell is
required, and the controller quickly compensates the torque based on slight rotation
change of the encoder at startup.
The default setting of F2-11 to F2-13 is proper for most large-power motors, and you
-
tor may have oscillation or noise at with-load startup, and passengers in the car may
have a strong feeling of car lurch. To eliminate oscillation, do as follows:
Decrease the value of F2-11 (between 5 and 15) to eliminate motor oscillation.
Decrease the values of F2-12 and F2-13 (between 0.1 and 0.8) to reduce the motor
noise and improve riding comfort at startup.
■
Adjustment for load cell startup
The parameter setting related to rollback at elevator startup and stop is described in
the following table.
Function
Code
Name Setting Range Default Description
F8-01
Pre-torque
selection
0: Pre-torque invalid
1: Weighing pre-torque
compensation
2: Pre-torque automatic
compensation
3: Weighing pre-torque and
automatic compensation
2
When a load cell is
used, set F8-01 to 1.
1: Weighing
pre-torque
compensation
F8-02
Pre-torque
0.0% to 100.0% 50.0%
These are pre-
torque regulating
parameters.
F8-03 Drive gain 0.00 to 2.00 0.60
F8-04 Brake gain 0.00 to 2.00 0.60
Notes:
braking or driving state according to the load cell signal and automatically calculates
the required torque compensation value. F8-03 and F8-04 are used to adjust elevator
startup when the analog load cell is used. The method of adjusting the two parame-
ters are as follows:
 Loading...
Loading...