5 System Commissioning
-
170
-
In the driving state, increase F8-03 properly if there is rollback at elevator startup, and
decrease F8-03 if there is car lurch at elevator startup.
In the braking state, increase F8-04 properly if there is jerk in command direction at
elevator startup, and decrease F8-04 if there is car lurch at elevator startup.
More details about these parameters are as follows:
percentage of the car load to the rated load when the car and counterweight are bal-
anced. This parameter must be set correctly. F8-03 (Drive gain) or F8-04 (Brake gain)
scales the elevator
or brake side. If the gain set is higher, then the calculated value of startup pro-torque
compensation is higher.
The motor
Motor driving state: full-load up, no-load down
Motor braking state: full-load down, no-load up
■
Comfort adjustment is enabled when the weighing compensation and
automatic compensation are both in eect.
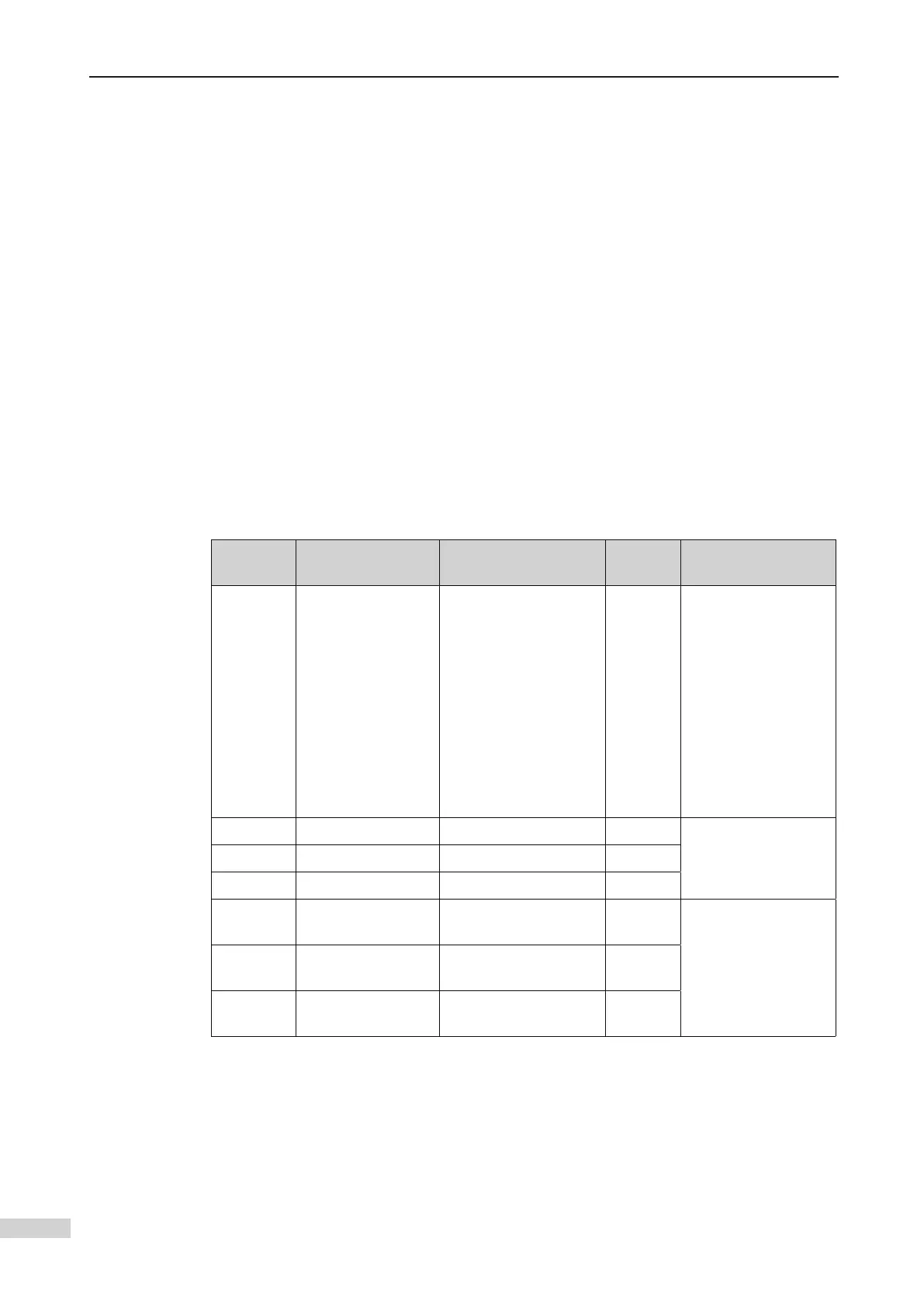
Function
Code
Name Setting Range Default Description
F8-01
Pre-torque
selection
0: Pre-torque invalid
1: Weighing pre-torque
compensation
2: Pre-torque
automatic
compensation
3: Weighing pre-
torque and automatic
compensation both in
2
When a load cell
is used and the
inconsistency of
caused by improper
load cell linearity, set
F8-01 to 3.
3: Weighing pre-
torque and automatic
compensation both
F8-02 0.0% to 100.0% 50.0%
These are pre-
torque regulating
parameters.
F8-03 Drive gain 0.00 to 2.00 0.60
F8-04 Brake gain 0.00 to 2.00 0.60
F2-11
Zero servo current
2.0% to 50.0% 15.0%
Automatic pre-
torque compensation
adjustment
parameters
F2-12
Zero servo speed
loop Kp
0.00 to 2.00 0.50
F2-13
Zero servo speed
loop Ti
0.00 to 2.00 0.60
Notes:
to the load cell signal, automatically calculates the required torque compensation
value,
and quickly corrects the torque compensation value according to the slight rotation
change of the encoder at the moment of startup.
 Loading...
Loading...