DA180 series basic AC servo drive Function codes
-158-
This parameter specifies whether to write all motor-related parameters to the EEPROM equipped
with the communication encoder. In any following startup, the drive uses the data in the EEPROM
for parameter initialization.
Mask encoder EEPROM
data faults
This parameter specifies whether to mask the fault indicating there is no data or incorrect data on
the EEPROM equipped with the communication encoder.
If fault Er2-c or Er2-d occurs but the motor model is set correctly, you can use the motor after
repower-on. The drive uses the motor data in the EEPROM equipped with the drive for parameter
initialization.
6.6 Program Jog, homing, and PTP control (group P5)
6.6.1 Program Jog settings
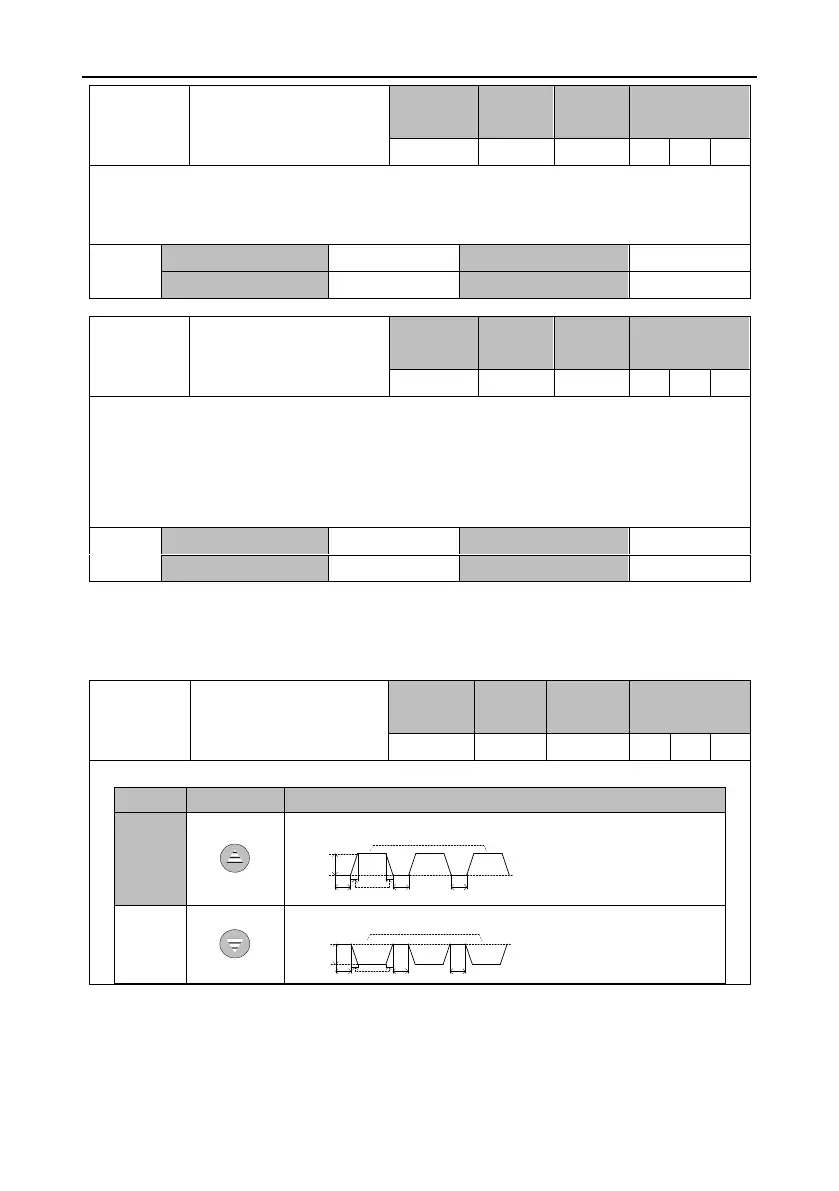
This parameter specifies the program Jog mode.
(Wait time P5.04→Forward moving P5.01) × Cycles P5.05
P5.02
Speed 0
P5.04 P5.03 P5.04 P5.04
P5.05
P5.01 P5.01
P5.01
(Wait time P5.04→Forward moving P5.01) × Cycles P5.05
P5.02
Speed 0
P5.04 P5.04
P5.05
P5.01P5.01
P5.01
P5.03 P5.04
 Loading...
Loading...
