DA180 series basic AC servo drive Appendix
-299-
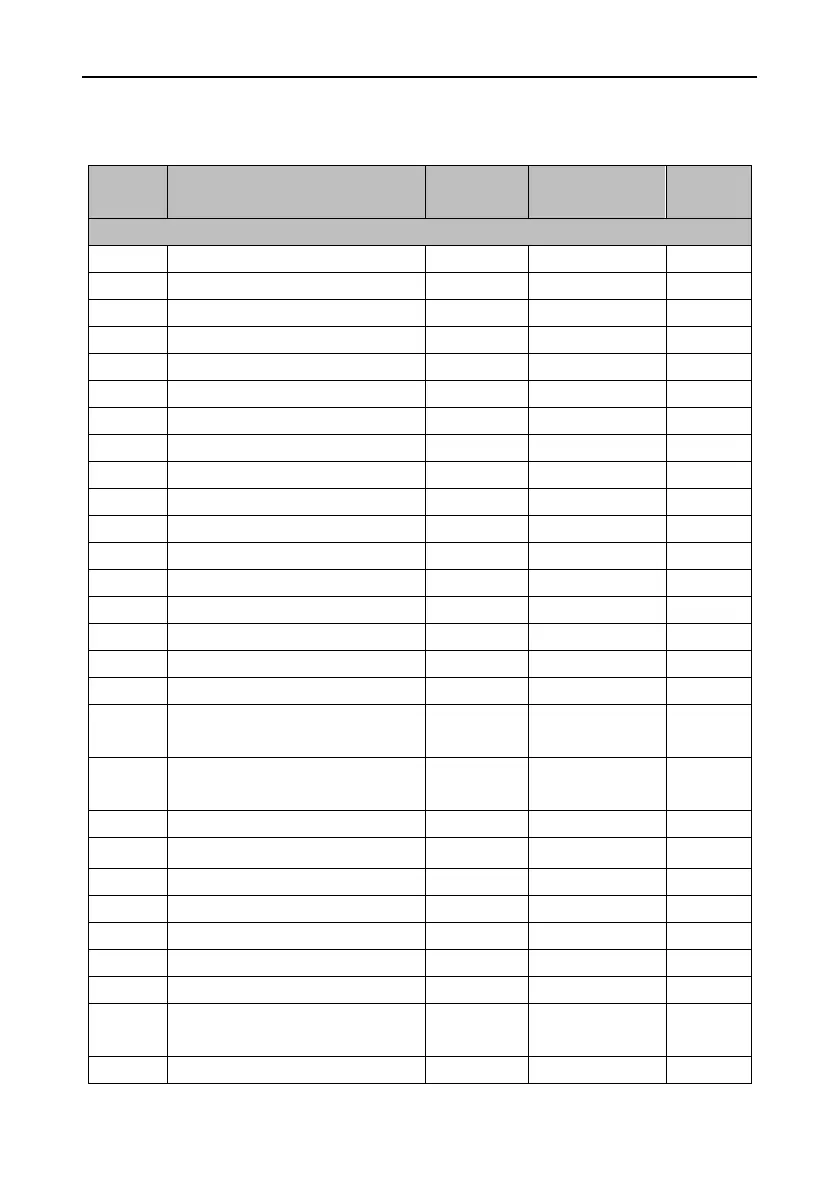
10.2 Parameters about monitoring
The following table lists the parameters for monitoring servo drive status.
Accumulated feedback pulses
Accumulated command pulses
Rotor position relative to pulse Z
Numerator of actual electronic gear
ratio
Denominator of actual electronic gear
ratio
Encoder absolute position feedback
Turns of multiturn encoder
EtherCAT clock synchronization
status
 Loading...
Loading...
