DA180 series basic AC servo drive Fault handling
-262-
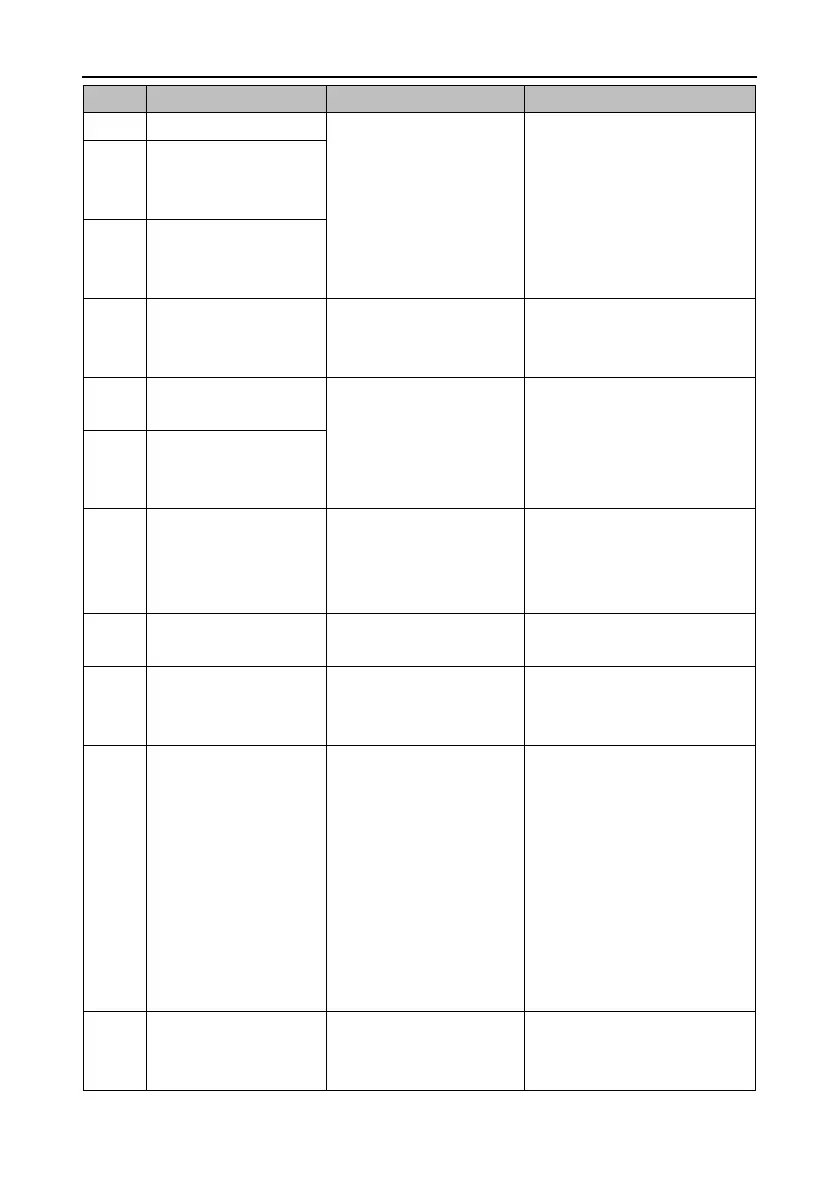
2. The motor shaft is
powered on in non-static
state.
repeatedly, replace the drive.
Current sensor fault–
Phase-V current sensor
fault
Current sensor fault–
Phase-W current sensor
fault
System initialization fault
There are failed self-check
items after power-on
initialization is complete.
1. Perform repower-on.
2. If the fault occurs repeatedly,
replace the drive.
Setting fault–Motor model
not exist
P0.00 is set incorrectly.
1. Ensure the motor model is set
correctly.
2. Ensure the motor parameter
model matches the drive power
class.
Setting fault–Motor and
drive model not match
Setting fault–Incorrect
software limits
Software limits are set
incorrectly. The setting of
P0.35 is equal to or less than
that of P0.36.
Set P0.35 and P0.36 correctly.
Setting fault–Incorrect
homing mode
The setting of P5.10 is
incorrect.
Setting fault–PTP-control
travel overflow
The single increment of a
PTP idle travel exceeds
(2
31
-1).
Ensure a single travel is not
greater than (2
31
-1) in absolute
position mode.
Regenerative brake
over-discharge
1. The brake resistor power
is low.
2. The motor speed is too
high or the deceleration is
too quick, which causes the
failure to absorb the
regenerate energy within
specified time.
3. The action limit of the
external brake resistor is
restricted to the duty ratio
10%.
1. Replace the internal brake
resistor with an external one and
increase the power.
2. Modify the deceleration time
and reduce the regenerative
discharge action rate.
3. Reduce the motor speed.
4. Improve the capacity of the
motor and drive.
AI overvoltage fault–AI 1
The voltage input to the port
of analog input 1 exceeds
the setting of P3.22.
1. Set P3.22, P3.25, and P3.75
correctly.
2. Ensure the terminal wiring is
 Loading...
Loading...
