Goodrive350 series high-performance multi-function inverter Chapter 6
-148-
Detailed parameter description
positive;
When the bit is set to 1, input terminal polarity is
negative;
0x000–0x3F
Set S1–S4, filter time of HDI terminal sampling. In
cases where interference is strong, increase the
value of this parameter to avoid mal-operation.
0.000–1.000s
0x000–0x3F (0: disable, 1: enable)
BIT0: S1 virtual terminal
BIT1: S2 virtual terminal
BIT2: S3 virtual terminal
BIT3: S4 virtual terminal
BIT8: HDIA virtual terminal
BIT9: HDIB virtual terminal
Terminal control
running mode
This function code is used to set the terminal control
running mode.
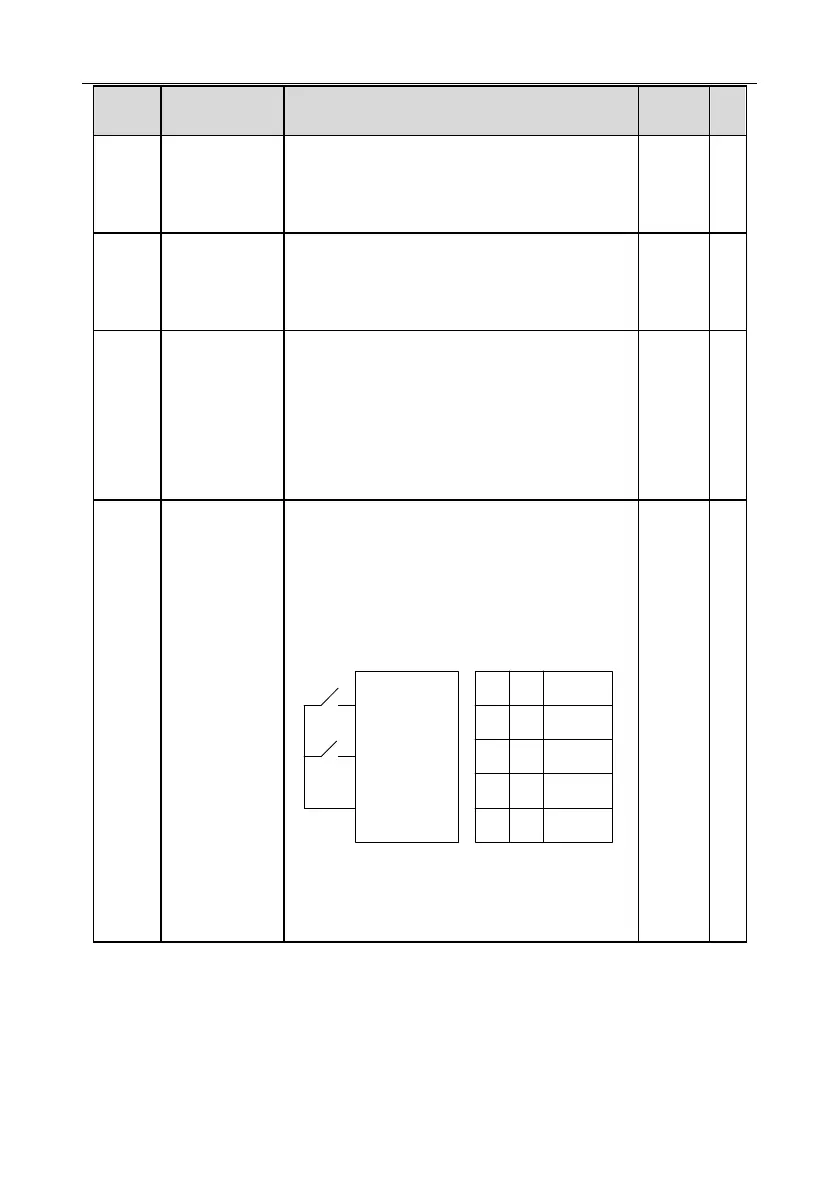
0: Dual-line control 1; integrate enabling function
with direction. This mode is the most popular
dual-line mode. Direction of motor rotation is
determined by the defined FWD/REV terminal
command.
FWD
REV
COM
K1
K2
Running
command
FWD REV
OFF OFF
OFF
OFF
ON
ON
ON ON
Stop
Hold
Forward
running
Reverse
running
1: Dual-line control 2; separate enabling function
with direction. In this mode, the defined FWD is
enabling terminal, and the direction is determined by
the state of REV.

 Loading...
Loading...




