Goodrive350 series high-performance multi-function inverter Chapter 6
-149-
Detailed parameter description
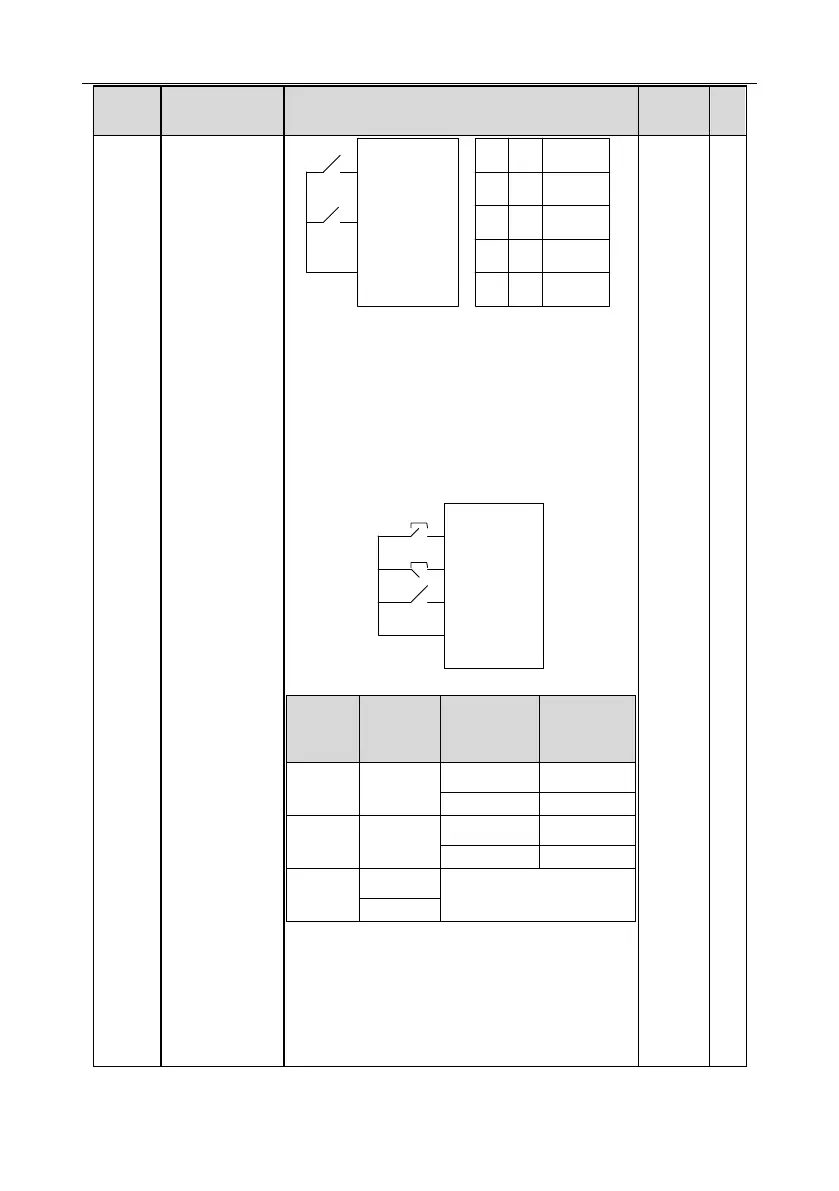
FWD
REV
COM
K1
K2
Running
command
FWD REV
OFF OFF
OFF
OFF
ON
ON
ON ON
Stop
Stop
Forward
running
Reverse
running
2: Tri-line control 1; This mode defines Sin as
enabling terminal, and the running command is
generated by FWD, the direction is controlled by
REV. During running, the Sin terminal should be
closed, and terminal FWD generates a rising edge
signal, then the inverter starts to run in the direction
set by the state of terminal REV; the inverter should
be stopped by disconnecting terminal Sin.
The direction control during running is shown below.
Previous
running
direction
Current
running
direction
Sln: Tri-line running control, FWD: Forward running,
REV: Reverse running
3: Tri-line control 2; This mode defines Sin as
enabling terminal. The running command is
generated by FWD or REV, and they control the
running direction. During running, the terminal Sin

 Loading...
Loading...




