Motor overload multiples M = Iout/(In×K)
In is rated motor current, lout is inverter output
current, K is motor overload protection coefficient.
The smaller the K, the larger the value of M, the
easier the protection.
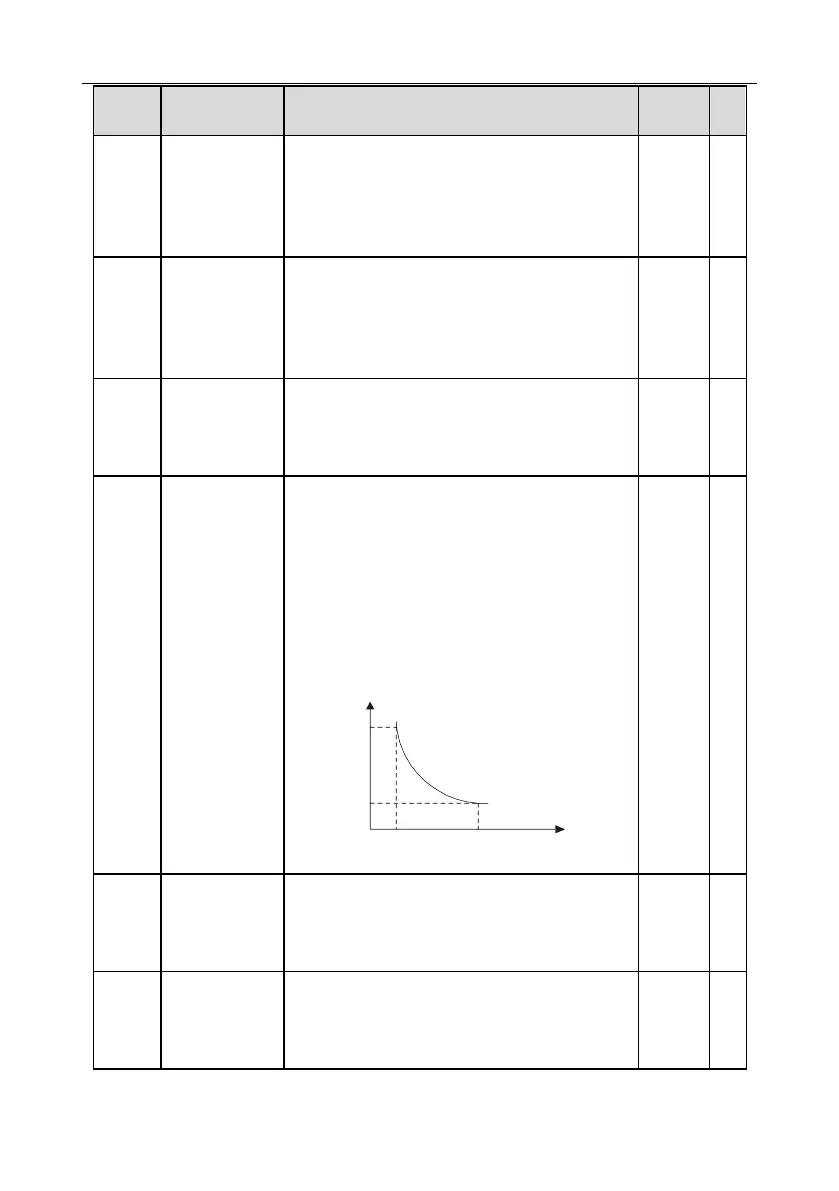
if M is 116%, protection will be applied when motor
overloads for 1h; if M is 200%, protection will be
applied when motor overloads for 60s; if M is no less
than 400%, protection will be applied immediately.
0: Display based on the motor type; under this mode,
only parameters related to current motor type will be
displayed.
1: Display all; under this mode, all the parameters
 Loading...
Loading...





